
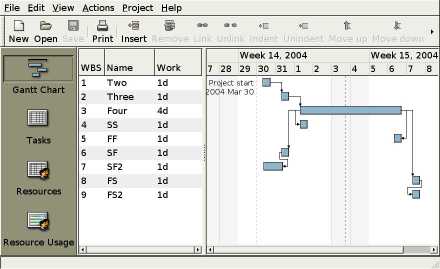
Hi again, Thanks for your comments. I have done some more work on the other predecessor types. I farmed the "compute min time for a particular predecessor relationsship" into a separate function. I have also implemented (what I think) the correct drawing of arrows in the gantt chart, let me know if you all think this is how they should work. It would also be nice to make sure that no lines were drawn through other tasks, but that might be a bit more work. New screenshot and cvs diff attached. Look at my last one to see what has changed. Anyway, assuming this all looks good... how do I go about getting it committed to CVS? What process does it have to go through. Cyas, Corey -- -- Corey Schuhen corey_m schuhen net http://schuhen.net
Attachment:
gantt_chart.jpg
Description: JPEG image
? .diff.diff.swp
? cppcomplete.tags
? diff.diff
? docs/.getting-started-hacking.xml.swp
? dotnet/Makefile
? dotnet/Makefile.in
? dotnet/libplanner/Makefile
? dotnet/libplanner/Makefile.in
? dotnet/samples/Makefile
? dotnet/samples/Makefile.in
? libplanner/.mrp-task-manager.c.swp
? libplanner/cppcomplete.tags
? libplanner/make_other_dep_types_work.patch
? src/.planner-relation-arrow.c.swp
? src/.planner-relation-arrow.h.swp
? src/cppcomplete.tags
Index: libplanner/mrp-task-manager.c
===================================================================
RCS file: /cvs/gnome/planner/libplanner/mrp-task-manager.c,v
retrieving revision 1.1.1.1
diff -r1.1.1.1 mrp-task-manager.c
856a857,895
> /* Calcluate the earliest start time that a particular predesessor relation
> * allows given:
> *
> */
> mrptime
> task_manager_calc_relation(MrpTask *task,
> MrpRelation *relation,
> MrpTask *predecessor)
> {
> /* Compute the earliest start time that this particular dependancy
> * would allow */
> switch(mrp_relation_get_relation_type (relation)){
>
> case MRP_RELATION_FF: /* finish-to-finish */
> return mrp_task_get_finish (predecessor) +
> mrp_relation_get_lag (relation) -
> (mrp_task_get_finish(task) -
> mrp_task_get_start(task));
>
> case MRP_RELATION_SS: /* start-to-start */
> return mrp_task_get_start (predecessor) +
> mrp_relation_get_lag (relation);
>
> case MRP_RELATION_SF: /* start-to-finish */
> return mrp_task_get_start (predecessor) +
> mrp_relation_get_lag (relation) -
> (mrp_task_get_finish(task) -
> mrp_task_get_start(task));
>
> case MRP_RELATION_NONE: /* unset */
> case MRP_RELATION_FS: /* finish-to-start */
> default:
> return mrp_task_get_finish (predecessor) +
> mrp_relation_get_lag (relation);
> }
>
>
> }
>
871c910
< mrptime finish;
---
> mrptime dep_start_time;
886,887c925,928
< finish = mrp_task_get_finish (predecessor) +
< mrp_relation_get_lag (relation);
---
> dep_start_time
> = task_manager_calc_relation(task,
> relation,
> predecessor);
889c930
< start = MAX (start, finish);
---
> start = MAX (start, dep_start_time);
Index: src/planner-gantt-chart.c
===================================================================
RCS file: /cvs/gnome/planner/src/planner-gantt-chart.c,v
retrieving revision 1.4
diff -r1.4 planner-gantt-chart.c
175c175,176
< TreeNode *predecessor);
---
> TreeNode *predecessor,
> MrpRelationType type);
805c806
< arrow = gantt_chart_add_relation (chart, task_node, predecessor_node);
---
> arrow = gantt_chart_add_relation (chart, task_node, predecessor_node, mrp_relation_get_relation_type(relation));
1036,1037c1037,1039
< TreeNode *task,
< TreeNode *predecessor)
---
> TreeNode *task,
> TreeNode *predecessor,
> MrpRelationType type)
1040c1042,1043
< PLANNER_GANTT_ROW (predecessor->item));
---
> PLANNER_GANTT_ROW (predecessor->item),
> type);
1185c1188,1190
< predecessor_node);
---
> predecessor_node,
> mrp_relation_get_relation_type(
> relation));
Index: src/planner-relation-arrow.c
===================================================================
RCS file: /cvs/gnome/planner/src/planner-relation-arrow.c,v
retrieving revision 1.2
diff -r1.2 planner-relation-arrow.c
38a39,70
> SS:
>
> 1: A
> +--XXXXXX
> B |
> +---XXXXX
> C
>
> FF:
>
> 1: A
> XXXXXX----+
> | B
> XXXXX---+
> C
>
> SF:
>
> 1: A (we have a maximum value for A)
> +------XXXXXX
> B |
> XXXXX
>
>
> 2: A (max value)
> +-XXXXXX
> B | C
> +---------------+
> |D
> XXXXX-+
> E (max value)
>
55,56d86
<
< TODO: Implement other types, remove the arguments from the geometry-changed signal.
254c284,285
<
---
> MrpRelationType type;
>
255a287
> type = priv->type;
267a300,302
> if(type == MRP_RELATION_SS){
> priv->num_points = 4;
> priv->arrow_dir = PLANNER_ARROW_RIGHT;
269,273c304,305
< /* Two cases for FS, as shown at the top of this file. */
< if (px2 <= sx1) {
< priv->num_points = 3;
<
< priv->points[0].x = px2;
---
> /* LHS of pred */
> priv->points[0].x = px1;
276,282c308,313
< priv->points[1].x = MAX (px2 + MIN_SPACING, sx1);
< priv->points[1].y = py1 + (py2 - py1) / 2;
<
< priv->points[2].x = MAX (px2 + MIN_SPACING, sx1);
< if (sy1 > py1) {
< priv->points[2].y = sy1;
< priv->arrow_dir = PLANNER_ARROW_DOWN;
---
> /* Next two, a bit left of the most left */
> if (sx1 < px1) {
> priv->points[1].x = sx1 - MIN_SPACING - ARROW_SIZE;
> priv->points[1].y = py1 + (py2 - py1) / 2;
> priv->points[2].x = sx1 - MIN_SPACING - ARROW_SIZE;
> priv->points[2].y = sy1 + (sy2 - sy1) / 2;
284,285c315,318
< priv->points[2].y = sy2;
< priv->arrow_dir = PLANNER_ARROW_UP;
---
> priv->points[1].x = px1 - MIN_SPACING - ARROW_SIZE;
> priv->points[1].y = py1 + (py2 - py1) / 2;
> priv->points[2].x = px1 - MIN_SPACING - ARROW_SIZE;
> priv->points[2].y = sy1 + (sy2 - sy1) / 2;
287,289c320,327
< } else {
< priv->num_points = 6;
< priv->arrow_dir = PLANNER_ARROW_RIGHT;
---
>
> priv->points[3].x = sx1;
> priv->points[3].y = sy1 + (sy2 - sy1) / 2;
>
> }else if(type == MRP_RELATION_FF){
>
> priv->num_points = 4;
> priv->arrow_dir = PLANNER_ARROW_LEFT;
290a329
> /* LHS of pred */
294,298c333,338
< priv->points[1].x = px2 + MIN_SPACING;
< priv->points[1].y = py1 + (py2 - py1) / 2;
<
< if (sy1 > py1) {
< y = py2 + (py2 - py1) / 2 - 1;
---
> /* Next two, a bit left of the most left */
> if (sx2 > px2) {
> priv->points[1].x = sx2 + MIN_SPACING + ARROW_SIZE;
> priv->points[1].y = py1 + (py2 - py1) / 2;
> priv->points[2].x = sx2 + MIN_SPACING + ARROW_SIZE;
> priv->points[2].y = sy1 + (sy2 - sy1) / 2;
300c340,343
< y = py1 - (py2 - py1) / 2 + 2;
---
> priv->points[1].x = px2 + MIN_SPACING + ARROW_SIZE;
> priv->points[1].y = py1 + (py2 - py1) / 2;
> priv->points[2].x = px2 + MIN_SPACING + ARROW_SIZE;
> priv->points[2].y = sy1 + (sy2 - sy1) / 2;
303,313c346,447
< priv->points[2].x = px2 + MIN_SPACING;
< priv->points[2].y = y;
<
< priv->points[3].x = sx1 - ARROW_SIZE - MIN_SPACING;
< priv->points[3].y = y;
<
< priv->points[4].x = sx1 - ARROW_SIZE - MIN_SPACING;
< priv->points[4].y = sy1 + (sy2 - sy1) / 2;
<
< priv->points[5].x = sx1;
< priv->points[5].y = sy1 + (sy2 - sy1) / 2;
---
> priv->points[3].x = sx2;
> priv->points[3].y = sy1 + (sy2 - sy1) / 2;
> }else if(type == MRP_RELATION_SF){
> /* Two cases for SF, as shown at the top of this file. */
> if (px1 >= sx2) {
> priv->num_points = 3;
>
> priv->points[0].x = px1;
> priv->points[0].y = py1 + (py2 - py1) / 2;
>
> priv->points[1].x = MIN (px1 - MIN_SPACING, sx2);
> priv->points[1].y = py1 + (py2 - py1) / 2;
>
> priv->points[2].x = MIN (px1 - MIN_SPACING, sx2);
> if (sy1 > py1) {
> priv->points[2].y = sy1;
> priv->arrow_dir = PLANNER_ARROW_DOWN;
> } else {
> priv->points[2].y = sy2;
> priv->arrow_dir = PLANNER_ARROW_UP;
> }
>
>
> } else {
> priv->num_points = 6;
> priv->arrow_dir = PLANNER_ARROW_LEFT;
>
> priv->points[0].x = px1;
> priv->points[0].y = py1 + (py2 - py1) / 2;
>
> priv->points[1].x = px1 - MIN_SPACING;
> priv->points[1].y = py1 + (py2 - py1) / 2;
>
> if (sy1 > py1) {
> y = py2 + (py2 - py1) / 2 - 1;
> } else {
> y = py1 - (py2 - py1) / 2 + 2;
> }
>
> priv->points[2].x = px1 - MIN_SPACING;
> priv->points[2].y = y;
>
> priv->points[3].x = sx2 + ARROW_SIZE + MIN_SPACING;
> priv->points[3].y = y;
>
> priv->points[4].x = sx2 + ARROW_SIZE + MIN_SPACING;
> priv->points[4].y = sy1 + (sy2 - sy1) / 2;
>
> priv->points[5].x = sx2;
> priv->points[5].y = sy1 + (sy2 - sy1) / 2;
> }
>
>
> }else{
> /* Two cases for FS, as shown at the top of this file. */
> if (px2 <= sx1) {
> priv->num_points = 3;
>
> priv->points[0].x = px2;
> priv->points[0].y = py1 + (py2 - py1) / 2;
>
> priv->points[1].x = MAX (px2 + MIN_SPACING, sx1);
> priv->points[1].y = py1 + (py2 - py1) / 2;
>
> priv->points[2].x = MAX (px2 + MIN_SPACING, sx1);
> if (sy1 > py1) {
> priv->points[2].y = sy1;
> priv->arrow_dir = PLANNER_ARROW_DOWN;
> } else {
> priv->points[2].y = sy2;
> priv->arrow_dir = PLANNER_ARROW_UP;
> }
>
>
> } else {
> priv->num_points = 6;
> priv->arrow_dir = PLANNER_ARROW_RIGHT;
>
> priv->points[0].x = px2;
> priv->points[0].y = py1 + (py2 - py1) / 2;
>
> priv->points[1].x = px2 + MIN_SPACING;
> priv->points[1].y = py1 + (py2 - py1) / 2;
>
> if (sy1 > py1) {
> y = py2 + (py2 - py1) / 2 - 1;
> } else {
> y = py1 - (py2 - py1) / 2 + 2;
> }
>
> priv->points[2].x = px2 + MIN_SPACING;
> priv->points[2].y = y;
>
> priv->points[3].x = sx1 - ARROW_SIZE - MIN_SPACING;
> priv->points[3].y = y;
>
> priv->points[4].x = sx1 - ARROW_SIZE - MIN_SPACING;
> priv->points[4].y = sy1 + (sy2 - sy1) / 2;
>
> priv->points[5].x = sx1;
> priv->points[5].y = sy1 + (sy2 - sy1) / 2;
> }
315c449
<
---
>
434c568
< planner_relation_arrow_new (PlannerGanttRow *successor, PlannerGanttRow *predecessor)
---
> planner_relation_arrow_new (PlannerGanttRow *successor, PlannerGanttRow *predecessor, MrpRelationType type)
448c582
<
---
> arrow->priv->type = type;
Index: src/planner-relation-arrow.h
===================================================================
RCS file: /cvs/gnome/planner/src/planner-relation-arrow.h,v
retrieving revision 1.2
diff -r1.2 planner-relation-arrow.h
55c55,56
< PlannerGanttRow *predecessor);
---
> PlannerGanttRow *predecessor,
> MrpRelationType type);
{kind=link}