RE: Dia and reactive planning (was: Dia Discontinued)
- From: "Rob Wortham" <r h wortham gmail com>
- To: "'Johann Tienhaara'" <jtienhaara yahoo com>, "'discussions about usage and development of dia'" <dia-list gnome org>
- Cc: Andreas Theodorou <A Theodorou bath ac uk>
- Subject: RE: Dia and reactive planning (was: Dia Discontinued)
- Date: Mon, 19 Sep 2016 12:14:49 +0100
Hi Johann
Thanks for your interest in my work and for your questions.
I don't have any specific problems with using the old version of python within Dia, it more that I have to
maintain an install of the old python version with newer versions required for other things. This works OK
right now, but as with everything you have to update at some point otherwise things stop working eventually.
Here is a short video of the R5 robot working with Plan4.inst created directly from the python export -
https://youtu.be/7Pur3ADVPO4
I have created plans with maybe 150 elements and it works fine. I think it would usefully scale up to several
hundred plan elements, although you would need some structure in your layout of the diagram to keep it
maintainable. The plans are not hierarchies, but directed graphs i.e. a sub tree can be used in multiple
places. I do not currently support any kind of diagram nesting. This visual approach works well for the
creation of reactive plans, and we are using it with other tools, see ABOD3 on GitHub
https://github.com/RecklessCoding/ABOD3
In terms of limitations I can't think of anything specific. It was a little difficult to work out how to
debug the python script from within the Dia environment.
I did look at doing this in MS-Visio, and even discounting the huge cost of Visio (I can get a free Uni
licence), I honestly think it was much easier in Dia with Python than it would have been using VBScript in
Visio.
One very handy facility would be the ability to group a set of elements and then collapse/expand them into a
single visible element, whilst maintaining the underlying object data structures.
I like Dia very much.
Cheers
Rob
-----Original Message-----
From: Johann Tienhaara [mailto:jtienhaara yahoo com]
Sent: 15 September 2016 02:49
To: Rob Wortham <r h wortham gmail com>; 'discussions about usage and development of dia' <dia-list gnome org>
Subject: Dia and reactive planning (was: Dia Discontinued)
Hi Rob,
I'm curious, what sorts of features in newer versions of Python would be helpful to your project?
I'm halfway through your introductory paper on Instinct
(http://www.robwortham.com/wp-content/uploads/2016/05/ICAPS-2016-PlanRob-Instinct-Planner.pdf)
and would highly recommend it to anyone who, like me, knows nothing about robot AI or "reactive planning".
It might very well be great for those well versed in the field, too. But the fact that it is well written
and low on acronyms makes it very approachable for outsiders like me.
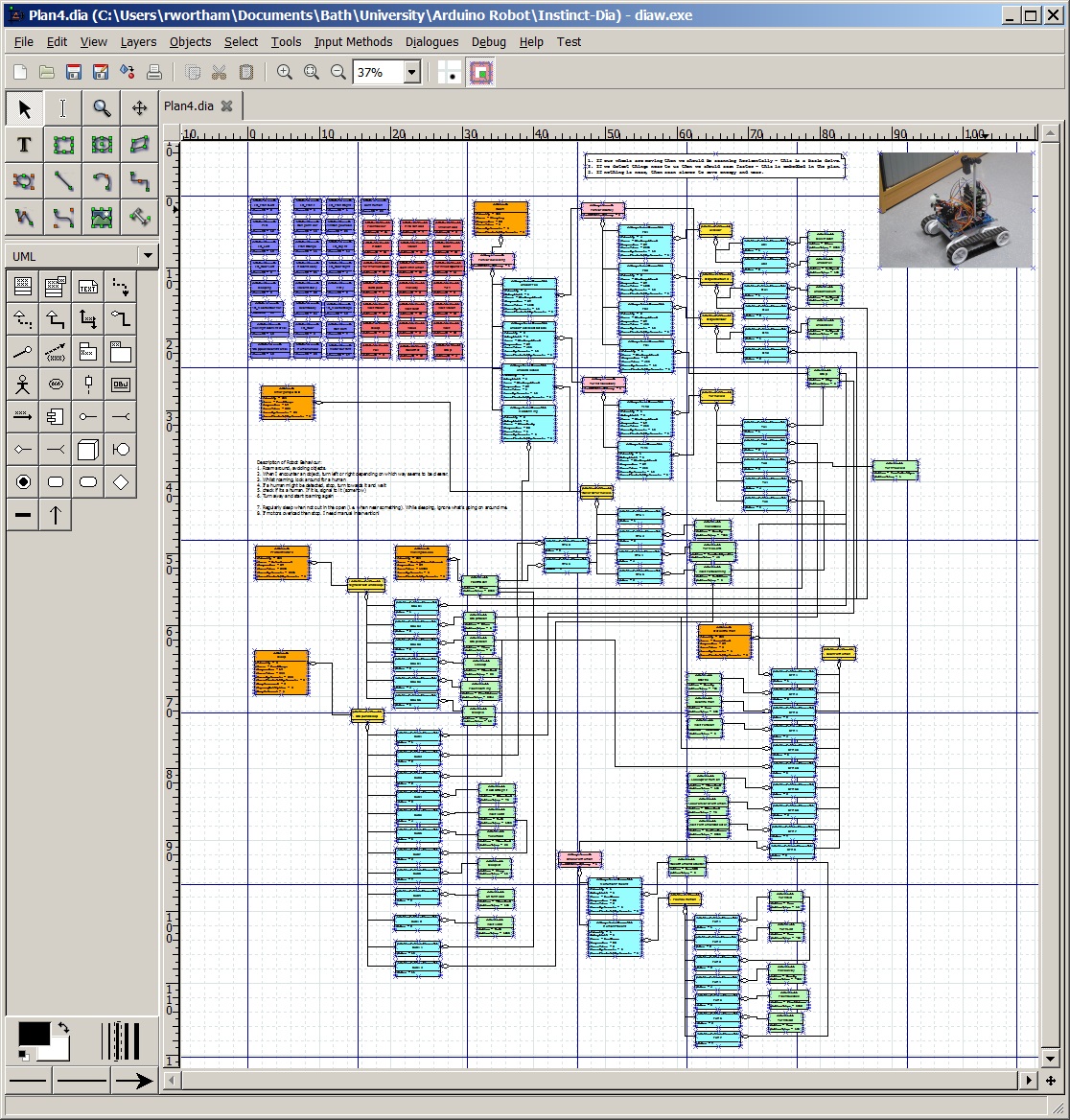
Your use of Dia is interesting. Do you have any videos of robots controlled by plans like the sample on your
website?
http://www.robwortham.com/wp-content/uploads/2016/05/Dia-Plan4.jpg
How well is the visual planning approach working for you? Are you at all constrained by lack of hierarchy in
a single Dia UML diagram? Or are the plans generally small? Or have you constructed a way to nest diagrams?
Or is it too soon to tell whether the visual approach will suffice for complex plans?
What kinds of limitations in Dia and/or Python did you hit? Coding
limitations (like getting the UML - to - plan code working)? Or UI /
usability issues? Etc?
I can't speak for anyone else on the list, of course, but I'd certainly be interested in hearing more about
your project in general, and experiences with Dia in particular.
Cheers,
Johann
________________________________
From: Rob Wortham <r h wortham gmail com>
To: 'Johann Tienhaara' <jtienhaara yahoo com>; 'discussions about usage and development of dia' <dia-list
gnome org>
Sent: Wednesday, September 14, 2016 2:10 PM
Subject: RE: Dia Discontinued
Hi Johann
My python work is here
https://github.com/rwortham/Instinct/tree/master/extras
Details also here http://www.robwortham.com/instinct-planner/
Cheers
Rob
[
Date Prev][Date Next] [
Thread Prev][
Thread Next]
[
Thread Index]
[
Date Index]
[
Author Index]

{kind=link}