[gnoduino] Update reference to Arduino SDK 1.0.3
- From: Lucian Langa <lucilanga src gnome org>
- To: commits-list gnome org
- Cc:
- Subject: [gnoduino] Update reference to Arduino SDK 1.0.3
- Date: Thu, 3 Jan 2013 00:40:56 +0000 (UTC)
commit 914928810db06beba8cba22b41d27a7d5eff33cb
Author: Pascal de Bruijn <pmjdebruijn pcode nl>
Date: Wed Jan 2 15:18:06 2013 +0100
Update reference to Arduino SDK 1.0.3
reference/AttachInterrupt.html | 5 +-
reference/BitwiseCompoundOr.html | 2 +-
reference/Changes.html | 74 ++++++++-
reference/ClientPrint.html | 3 +-
reference/ClientPrintln.html | 3 +-
reference/Constants.html | 19 ++-
reference/DetachInterrupt.html | 5 +-
reference/Ethernet.html | 2 +
reference/EthernetBegin.html | 6 +-
reference/EthernetMaintain.html | 106 ++++++++++++
reference/FAQ.html | 4 +-
reference/FileClose.html | 2 +-
reference/Guide_ArduinoLeonardo.html | 233 ++++++++++++++++++++++++++
reference/Guide_ArduinoMini.html | 15 +-
reference/Guide_ArduinoWirelessShield.html | 229 ++++++++++++++++++++++++++
reference/Guide_Environment.html | 25 +++-
reference/Guide_MacOSX.html | 9 +-
reference/Guide_Troubleshooting.html | 2 +-
reference/Guide_Windows.html | 4 +-
reference/Guide_index.html | 17 +-
reference/KeyboardBegin.html | 188 +++++++++++++++++++++
reference/KeyboardEnd.html | 185 +++++++++++++++++++++
reference/KeyboardModifiers.html | 216 +++++++++++++++++++++++++
reference/KeyboardPress.html | 204 +++++++++++++++++++++++
reference/KeyboardPrint.html | 193 ++++++++++++++++++++++
reference/KeyboardPrintln.html | 192 ++++++++++++++++++++++
reference/KeyboardRelease.html | 204 +++++++++++++++++++++++
reference/KeyboardReleaseAll.html | 203 +++++++++++++++++++++++
reference/KeyboardWrite.html | 205 +++++++++++++++++++++++
reference/Libraries.html | 8 +-
reference/LiquidCrystalBegin.html | 3 +-
reference/LiquidCrystalSetCursor.html | 1 +
reference/MouseBegin.html | 184 +++++++++++++++++++++
reference/MouseClick.html | 191 ++++++++++++++++++++++
reference/MouseEnd.html | 187 +++++++++++++++++++++
reference/MouseIsPressed.html | 204 +++++++++++++++++++++++
reference/MouseKeyboard.html | 128 +++++++++++++++
reference/MouseMove.html | 242 ++++++++++++++++++++++++++++
reference/MousePress.html | 200 +++++++++++++++++++++++
reference/MouseRelease.html | 196 ++++++++++++++++++++++
reference/PinMode.html | 99 +++++++++---
reference/SPI.html | 4 +-
reference/Serial.html | 26 +++-
reference/Serial_Available.html | 34 +++--
reference/Serial_Begin.html | 123 +++++++++++---
reference/Serial_End.html | 12 ++-
reference/Serial_Find.html | 98 +++++++++++
reference/Serial_FindUntil.html | 102 ++++++++++++
reference/Serial_Flush.html | 17 ++-
reference/Serial_IfSerial.html | 191 ++++++++++++++++++++++
reference/Serial_ParseFloat.html | 101 ++++++++++++
reference/Serial_ParseInt.html | 174 ++++++++++++++++++++
reference/Serial_Peek.html | 14 ++-
reference/Serial_Print.html | 15 ++-
reference/Serial_Println.html | 17 ++-
reference/Serial_Read.html | 112 ++++++++++---
reference/Serial_ReadBytes.html | 103 ++++++++++++
reference/Serial_ReadBytesUntil.html | 104 ++++++++++++
reference/Serial_SetTimeout.html | 100 ++++++++++++
reference/Serial_Write.html | 10 +-
reference/ServerPrint.html | 3 +-
reference/ServerPrintln.html | 3 +-
reference/ShiftIn.html | 12 +-
reference/Sizeof.html | 9 +-
reference/SoftwareSerial.html | 39 +++++-
reference/SoftwareSerialAvailable.html | 103 +++++++++---
reference/SoftwareSerialBegin.html | 101 +++++++++---
reference/SoftwareSerialIsListening.html | 4 +-
reference/SoftwareSerialListen.html | 10 +-
reference/SoftwareSerialOverflow.html | 8 +-
reference/SoftwareSerialPeek.html | 179 ++++++++++++++++++++
reference/SoftwareSerialPrint.html | 4 +-
reference/SoftwareSerialPrintln.html | 4 +-
reference/SoftwareSerialRead.html | 86 ++++++++--
reference/SoftwareSerialWrite.html | 2 +-
reference/Stepper.html | 2 +-
reference/StepperStep.html | 2 +-
reference/Stream.html | 112 +++++++++++++
reference/StreamAvailable.html | 105 ++++++++++++
reference/StreamFind.html | 106 ++++++++++++
reference/StreamFindUntil.html | 108 ++++++++++++
reference/StreamFlush.html | 105 ++++++++++++
reference/StreamParseFloat.html | 108 ++++++++++++
reference/StreamParseInt.html | 108 ++++++++++++
reference/StreamPeek.html | 106 ++++++++++++
reference/StreamRead.html | 106 ++++++++++++
reference/StreamReadBytes.html | 109 +++++++++++++
reference/StreamReadBytesUntil.html | 110 +++++++++++++
reference/StreamSetTimeout.html | 105 ++++++++++++
reference/StringBrackets.html | 109 +++++++++++++
reference/StringCharAt.html | 108 ++++++++++++
reference/StringCompareTo.html | 109 +++++++++++++
reference/StringComparison.html | 111 +++++++++++++
reference/StringConcat.html | 107 ++++++++++++
reference/StringConstructor.html | 141 ++++++++++++++++
reference/StringEndsWith.html | 111 +++++++++++++
reference/StringEquals.html | 110 +++++++++++++
reference/StringEqualsIgnoreCase.html | 110 +++++++++++++
reference/StringGetBytes.html | 112 +++++++++++++
reference/StringIndexOf.html | 111 +++++++++++++
reference/StringLastIndexOf.html | 111 +++++++++++++
reference/StringLength.html | 107 ++++++++++++
reference/StringPlus.html | 110 +++++++++++++
reference/StringReplace.html | 111 +++++++++++++
reference/StringSetCharAt.html | 108 ++++++++++++
reference/StringStartsWith.html | 111 +++++++++++++
reference/StringSubstring.html | 107 ++++++++++++
reference/StringToCharArray.html | 112 +++++++++++++
reference/StringToLowerCase.html | 109 +++++++++++++
reference/StringToUpperCase.html | 109 +++++++++++++
reference/StringTrim.html | 107 ++++++++++++
reference/Wire.html | 13 +-
reference/WireAvailable.html | 2 +-
reference/WireBeginTransmission.html | 4 +-
reference/WireEndTransmission.html | 29 +++-
reference/WireOnReceive.html | 2 +-
reference/WireRequestFrom.html | 21 ++-
reference/WireWrite.html | 2 +-
reference/index.html | 10 +-
119 files changed, 9653 insertions(+), 285 deletions(-)
---
diff --git a/reference/AttachInterrupt.html b/reference/AttachInterrupt.html
index cc50754..74a90ae 100644
--- a/reference/AttachInterrupt.html
+++ b/reference/AttachInterrupt.html
@@ -66,10 +66,13 @@ a.varlink { text-decoration:none; }
<div id='wikitext'>
<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
</p>
-<p class='vspace'></p><h2>attachInterrupt(interrupt, function, mode)</h2>
+<p class='vspace'></p><h2>attachInterrupt()</h2>
<p class='vspace'></p><h4>Description</h4>
<p>Specifies a function to call when an external interrupt occurs. Replaces any previous function that was attached to the interrupt. Most Arduino boards have two external interrupts: numbers 0 (on digital pin 2) and 1 (on digital pin 3). The Arduino Mega has an additional four: numbers 2 (pin 21), 3 (pin 20), 4 (pin 19), and 5 (pin 18).
</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>attachInterrupt(interrupt, function, mode)
+</p>
<p class='vspace'></p><h4>Parameters</h4>
<p><strong>interrupt</strong>: the number of the interrupt (<em>int</em>)
</p>
diff --git a/reference/BitwiseCompoundOr.html b/reference/BitwiseCompoundOr.html
index cbb33ea..85db883 100644
--- a/reference/BitwiseCompoundOr.html
+++ b/reference/BitwiseCompoundOr.html
@@ -90,7 +90,7 @@ myByte | B00000000 = myByte;
</p>
<p class='vspace'></p><p>Bits that are "bitwise <span class='wikiword'>ORed</span>" with 1 are set to 1 so:<br />myByte | B11111111 = B11111111;
</p>
-<p class='vspace'></p><p>Consequently - to set bits 0 & 1 of a variable, while leaving the rest of the variable unchanged, use the compound bitwise AND operator (|=) with the constant B00000011
+<p class='vspace'></p><p>Consequently - to set bits 0 & 1 of a variable, while leaving the rest of the variable unchanged, use the compound bitwise OR operator (|=) with the constant B00000011
</p><pre>
1 0 1 0 1 0 1 0 variable
0 0 0 0 0 0 1 1 mask
diff --git a/reference/Changes.html b/reference/Changes.html
index 8d520bf..d4936be 100644
--- a/reference/Changes.html
+++ b/reference/Changes.html
@@ -69,17 +69,75 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><h2>Changes</h2>
<p>This page lists major changes to the Arduino core, libraries, and environment. For details, see the <a class='wikilink' href='http://arduino.cc/en/Main/ReleaseNotes'>release notes</a>.
</p>
-<p class='vspace'></p><h3>Changes in Arduino 0019</h3>
+<p class='vspace'></p><h3>Changes in Arduino 1.0.1</h3>
+<p><strong>Environment (IDE)</strong>
+</p><ul><li>Internationalization of the IDE and translation into multiple languages (selected in preferences dialog).
+</li><li>New preference for skipping verification during upload (for increased speed).
+</li><li>Speeded up compilation by only compiling changed files. (Except for the first compilation after selecting a new board, when all files are compiled.)
+</li></ul><p class='vspace'></p><p><strong>Language (API)</strong>
+</p><ul><li>Added support for the Arduino Leonardo.
+</li><li>Added Leonardo-specific <a class='wikilink' href='MouseKeyboard.html'>Mouse and Keyboard libraries</a>.
+</li><li>Added INPUT_PULLUP argument to <a class='wikilink' href='PinMode.html'>pinMode()</a> function. The INPUT mode now explicitly disables the pullup resistors.
+</li><li>Added ability to generate repeated starts in the Wire library (in master mode). Extra boolean parameters to <a class='wikilink' href='WireEndTransmission.html'>endTransmission()</a> and <a class='wikilink' href='WireRequestFrom.html'>requestFrom()</a> control whether or not to send a stop (or a repeated start instead)
+</li><li>Added <a class='wikilink' href='EthernetMaintain.html'>Ethernet.maintain()</a> function for renewing DHCP leases.
+</li><li>Added readString() and readStringUntil() functions to Stream, Serial, etc.
+</li></ul><p class='vspace'></p><h3>Changes in Arduino 1.0</h3>
+<p><strong>Environment (IDE)</strong>
+</p><ul><li>New file extension (.ino).
+</li><li>New toolbar icons: checkmark (verify) and arrow (upload). (Nicholas Zambetti)
+</li><li>New color scheme, document icon, about image (!<span class='wikiword'>ToDo</span>).
+</li><li>Board name and serial port are shown in status line at the bottom of the editor. (from Wiring)
+</li><li><span class='wikiword'>URLs</span> in the sketch code are now clickable hyperlinks (issue 148) (Christian Maglie)
+</li><li>Progress bar shown during compilation and upload. (from Wiring)
+</li><li>Support for uploading sketches from within the IDE: hold shift while clicking upload or select "Upload Using Programmer" from the File menu. Select programmer from the Tools menu of the IDE.
+</li><li>Verbose output (during compilation or uploading) now enabled from within the preferences dialog.
+</li></ul><p class='vspace'></p><p><strong>Language (API)</strong>
+</p><ul><li>Switching to non-blocking Serial writes with a transmit buffer.
+</li><li><a class='wikilink' href='Serial_Flush.html'>Serial.flush()</a> now waits for transmission of outgoing data rather than discarding received incoming data.
+</li><li>Reimplementation of the <a class='wikilink' href='SoftwareSerial.html'>SoftwareSerial library</a> to support multiple ports (!<span class='wikiword'>NewSoftSerial</span> by Mikal Hart).
+</li><li>Removed Matrix and Sprite libraries.
+</li><li><a class='wikilink' href='Serial_Print.html'>Serial.print(byte)</a> now prints the digits of the number as characters; use <a class='wikilink' href='Serial_Write.html'>write()</a> to send as a single byte.
+</li><li><a class='wikilink' href='Serial_Write.html'>write()</a>, <a class='wikilink' href='Serial_Print.html'>print()</a>, and <a class='wikilink' href='Serial_Println.html'>println()</a> now return size_t (unsigned int) instead of void (issue 551): number of bytes written.
+</li><li><a class='wikilink' href='Serial_Write.html'>write(str)</a> in Print is no longer virtual, so subclasses of Print or Stream can't (but also don't need to) override it.
+</li><li>Added getWriteError(), clearWriteError(), and protected setWriteError() methods to Print; use to check for, clear, and set a write error flag.
+</li><li>Removed the ability to say "client == NULL" or "client != NULL" from Ethernet library; use "if (client)" or "if (!client)" instead.
+</li><li>Reimplementation of <a class='wikilink' href='StringObject.html'>String class</a> (Paul Stoffregen + additional modifications).
+</li><li>Added support for Flash-based strings using the F("string") syntax.
+</li><li>Added DHCP and DNS support to the <a class='wikilink' href='Ethernet.html'>Ethernet library</a> (integration by Adrian !<span class='wikiword'>McEwen</span>).
+</li><li>Renamed Ethernet Client, Server, and UDP classes to <span class='wikiword'>EthernetClient</span>, <span class='wikiword'>EthernetServer</span>, and <span class='wikiword'>EthernetUDP</span> to allow for simultaneous use of other networking libraries.
+</li><li>Modified UDP API:
+<ul><li><a class='wikilink' href='EthernetUDPBeginPacket.html'>beginPacket()</a> / <a class='wikilink' href='EthernetUDPEndPacket.html'>endPacket()</a> for bracketing outgoing UDP packet construction
+</li><li>Inheriting from Stream, using write(), print(), and println() for UDP packet construction
+</li><li><a class='wikilink' href='EthernetUDPParsePacket.html'>parsePacket()</a> for parsing incoming packets (and checking if there is one)
+</li><li>available(), read(), peek() for reading bytes of incoming packet
+</li><li><a class='wikilink' href='EthernetUDPRemoteIP.html'>remoteIP()</a>, <a class='wikilink' href='EthernetUDPRemotePort.html'>remotePort()</a> for information about incoming packet
+</li></ul></li><li>Addition of <a class='wikilink' href='EthernetIPAddress.html'>IPAddress</a> class (Adrian !<span class='wikiword'>McEwen</span>).
+</li><li>Modified Wire library to inherit from Stream; i.e. to use read(), write(), print(), println(), etc. Bracket calls to those functions with beginTransmission() and endTransmission().
+</li><li>Adding support for multiple open files and directory iteration in <a class='wikilink' href='SD.html'>SD card library</a> (Limor Fried).
+</li><li>Added <a class='wikilink' href='SerialEvent.html'>serialEvent()</a> function, called automatically on reception of serial data if it exists. Also, serialEvent1(), serialEvent2(), and serialEvent3() on the Mega.
+</li><li>Added <a class='wikilink' href='StreamFind.html'>find()</a>, <a class='wikilink' href='StreamFindUntil.html'>findUntil()</a>, <a class='wikilink' href='StreamParseInt.html'>parseInt()</a>, <a class='wikilink' href='StreamParseFloat.html'>parseFloat()</a>, <a class='wikilink' href='StreamReadBytes.html'>readBytes()</a>, <a class='wikilink' href='StreamReadBytesUntil.html'>readBytesUntil()</a>, and <a class='wikilink' href='StreamSetTimeout.html'>setTimeout()</a> to Stream (issue 458 - Michael Margolis).
+</li><li>Updated Firmata to version 2.3 (r71): analog inputs now numbered from 14 (not 16) when used as digital pins.
+</li></ul><p class='vspace'></p><p><strong>Internals</strong>
+</p><ul><li>Renamed <span class='wikiword'>WProgram</span>.h to Arduino.h.
+</li><li>Pin definitions separated from the core and stored in new variants/ sub-directory. Specified by the _BOARD_.build.variant preference in boards.txt.
+</li><li>Added macros / constants for getting information about the properties of the board (issue 490 and issue 495)
+</li></ul><p class='vspace'></p><p><strong>Tools</strong>
+</p><ul><li>Updated avrdude to 5.11 (and switched to arduino programmer type from stk500).
+</li></ul><p class='vspace'></p><h3>Changes in Arduino 0023</h3>
+<h3>Changes in Arduino 0022</h3>
+<h3>Changes in Arduino 0021</h3>
+<h3>Changes in Arduino 0020</h3>
+<h3>Changes in Arduino 0019</h3>
<ul><li>Added <a class='wikilink' href='StringObject.html'>String</a> class.
-<p class='vspace'></p></li><li>Added <a class='wikilink' href='ShiftIn.html'>shiftIn()</a> function.
-<p class='vspace'></p></li><li>Added <a class='wikilink' href='Serial_Peek.html'>Serial.peek()</a> function.
-<p class='vspace'></p></li><li>Added aliases for the analog input pins: A0, A1, etc.
-<p class='vspace'></p></li><li>Added <a class='wikilink' href='SPI.html'>SPI</a> library.
-<p class='vspace'></p></li><li>Ethernet library now depends on the SPI library; add <code>#include <SPI.h></code> to the top of sketches.
+</li><li>Added <a class='wikilink' href='ShiftIn.html'>shiftIn()</a> function.
+</li><li>Added <a class='wikilink' href='Serial_Peek.html'>Serial.peek()</a> function.
+</li><li>Added aliases for the analog input pins: A0, A1, etc.
+</li><li>Added <a class='wikilink' href='SPI.html'>SPI</a> library.
+</li><li>Ethernet library now depends on the SPI library; add <code>#include <SPI.h></code> to the top of sketches.
</li></ul><p class='vspace'></p><h3>Changes in Arduino 0018</h3>
<ul><li>Added <a class='wikilink' href='Tone.html'>tone()</a> and <a class='wikilink' href='NoTone.html'>noTone()</a> functions.
-<p class='vspace'></p></li><li>Added <a class='wikilink' href='Serial_End.html'>Serial.end()</a> function.
-<p class='vspace'></p></li><li>Added support for <a class='urllink' href='http://code.google.com/p/arduino/wiki/Platforms' rel='nofollow'>third-party hardware</a> in the hardware sub-directory of the Arduino sketchbook.
+</li><li>Added <a class='wikilink' href='Serial_End.html'>Serial.end()</a> function.
+</li><li>Added support for <a class='urllink' href='http://code.google.com/p/arduino/wiki/Platforms' rel='nofollow'>third-party hardware</a> in the hardware sub-directory of the Arduino sketchbook.
</li></ul><p class='vspace'></p><h3>Changes in Arduino 0017</h3>
<ul><li><strong>Environment</strong>: The code base for the Arduino development environment was largely re-written to bring it back into sync with Processing (1.0.3). The main differences include support for multiple sketch windows open simultaneously and a dedicated window for the serial monitor.
<p class='vspace'></p></li><li><strong>Icons</strong>: The icons and about images were updated.
diff --git a/reference/ClientPrint.html b/reference/ClientPrint.html
index efc869e..8cdaba1 100644
--- a/reference/ClientPrint.html
+++ b/reference/ClientPrint.html
@@ -81,8 +81,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>BASE (optional): the base in which to print numbers: DEC for decimal (base 10), OCT for octal (base 8), HEX for hexadecimal (base 16).<br />
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>byte<br />print() will return the number of bytes written, though reading that number is optional
-<a class='wikilink' href='index.html'>Reference Home</a>
+<p>byte: returns the number of bytes written, though reading that number is optional<br /><br /><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/ClientPrintln.html b/reference/ClientPrintln.html
index 2d82039..3bac2df 100644
--- a/reference/ClientPrintln.html
+++ b/reference/ClientPrintln.html
@@ -81,8 +81,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>BASE (optional): the base in which to print numbers: DEC for decimal (base 10), OCT for octal (base 8), HEX for hexadecimal (base 16).
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>byte<br />print()ln will return the number of bytes written, though reading that number is optional
-<a class='wikilink' href='index.html'>Reference Home</a>
+<p>byte: return the number of bytes written, though reading that number is optional<br /><br /><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/Constants.html b/reference/Constants.html
index 24ee915..e6fcc3f 100644
--- a/reference/Constants.html
+++ b/reference/Constants.html
@@ -76,9 +76,9 @@ a.varlink { text-decoration:none; }
<p>false is the easier of the two to define. false is defined as 0 (zero).
</p>
<p class='vspace'></p><h4>true</h4>
-<p>true is often said to be defined as 1, which is correct, but true has a wider definition. Any integer which is <em>non-zero</em> is TRUE, in a Boolean sense. So -1, 2 and -200 are all defined as true, too, in a Boolean sense.
+<p>true is often said to be defined as 1, which is correct, but true has a wider definition. Any integer which is <em>non-zero</em> is true, in a Boolean sense. So -1, 2 and -200 are all defined as true, too, in a Boolean sense.
</p>
-<p class='vspace'></p><p>Note that the <em>true</em> and <em>false</em> constants are typed in lowercase unlike HIGH, LOW, INPUT, & OUTPUT.
+<p class='vspace'></p><p>Note that the <em>true</em> and <em>false</em> constants are typed in lowercase unlike HIGH, LOW, INPUT, & OUTPUT.
</p>
<p class='vspace'></p><h3>Defining Pin Levels, HIGH and LOW</h3>
<p>When reading or writing to a digital pin there are only two possible values a pin can take/be-set-to: <strong>HIGH</strong> and <strong>LOW</strong>.
@@ -88,7 +88,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>The meaning of HIGH (in reference to a pin) is somewhat different depending on whether a pin is set to an INPUT or OUTPUT.
When a pin is configured as an INPUT with pinMode, and read with digitalRead, the microcontroller will report HIGH if a voltage of 3 volts or more is present at the pin.
</p>
-<p class='vspace'></p><p>A pin may also be configured as an INPUT with pinMode, and subsequently made HIGH with digitalWrite, this will set the internal 20K pullup resistors, which will <em>steer</em> the input pin to a HIGH reading unless it is pulled LOW by external circuitry.
+<p class='vspace'></p><p>A pin may also be configured as an INPUT with pinMode, and subsequently made HIGH with digitalWrite, this will set the internal 20K pullup resistors, which will <em>steer</em> the input pin to a HIGH reading unless it is pulled LOW by external circuitry. This is how INPUT_PULLUP works as well
</p>
<p class='vspace'></p><p>When a pin is configured to OUTPUT with pinMode, and set to HIGH with digitalWrite, the pin is at 5 volts. In this state it can <em>source</em> current, e.g. light an LED that is connected through a series resistor to ground, or to another pin configured as an output, and set to LOW.
</p>
@@ -98,11 +98,16 @@ When a pin is configured as an INPUT with pinMode, and read with digitalRead, th
</p>
<p class='vspace'></p><p>When a pin is configured to OUTPUT with pinMode, and set to LOW with digitalWrite, the pin is at 0 volts. In this state it can <em>sink</em> current, e.g. light an LED that is connected through a series resistor to, +5 volts, or to another pin configured as an output, and set to HIGH.
</p>
-<p class='vspace'></p><h3>Defining Digital Pins, INPUT and OUTPUT</h3>
-<p>Digital pins can be used either as <strong>INPUT</strong> or <strong>OUTPUT</strong>. Changing a pin from INPUT TO OUTPUT with pinMode() drastically changes the electrical behavior of the pin.
+<p class='vspace'></p><h3>Defining Digital Pins, INPUT, INPUT_PULLUP, and OUTPUT</h3>
+<p>Digital pins can be used as <strong>INPUT</strong>, <strong>INPUT_PULLUP</strong>, or <strong>OUTPUT</strong>. Changing a pin with pinMode() changes the electrical behavior of the pin.
</p>
-<p class='vspace'></p><h4>Pins Configured as Inputs</h4>
-<p>Arduino (Atmega) pins configured as <strong>INPUT</strong> with pinMode() are said to be in a high-impedance state. One way of explaining this is that pins configured as INPUT make extremely small demands on the circuit that they are sampling, say equivalent to a series resistor of 100 Megohms in front of the pin. This makes them useful for reading a sensor, but not powering an LED.
+<p class='vspace'></p><h4>Pins Configured as INPUT</h4>
+<p>Arduino (Atmega) pins configured as <strong>INPUT</strong> with pinMode() are said to be in a high-impedance state. Pins configured as INPUT make extremely small demands on the circuit that they are sampling, equivalent to a series resistor of 100 Megohms in front of the pin. This makes them useful for reading a sensor, but not powering an LED.
+</p>
+<p class='vspace'></p><p>If you have your pin configured as an INPUT, you will want the pin to have a reference to ground, often accomplished with a pull-down resistor (a resistor going to ground) as described in the <a class='wikilink' href='http://arduino.cc/en/Tutorial/DigitalReadSerial'>Digital Read Serial</a> tutorial.
+</p>
+<p class='vspace'></p><h4>Pins Configured as INPUT_PULLUP</h4>
+<p>The Atmega chip on the Arduino has internal pull-up resistors (resistors that connect to power internally) that you can access. If you prefer to use these instead of external pull-down resistors, you can use the <strong>INPUT_PULLUP</strong> argument in pinMode(). This effectively inverts the behavior, where HIGH means the sensor is off, and LOW means the sensor is on. See the <a class='wikilink' href='http://arduino.cc/en/Tutorial/InputPullupSerial'>Input Pullup Serial</a> tutorial for an example of this in use.
</p>
<p class='vspace'></p><h4>Pins Configured as Outputs</h4>
<p>Pins configured as <strong>OUTPUT</strong> with pinMode() are said to be in a low-impedance state. This means that they can provide a substantial amount of current to other circuits. Atmega pins can source (provide positive current) or sink (provide negative current) up to 40 mA (milliamps) of current to other devices/circuits. This makes them useful for powering LED's but useless for reading sensors. Pins configured as outputs can also be damaged or destroyed if short circuited to either ground or 5 volt power rails. The amount of current provided by an Atmega pin is also not enough to power most relays or motors, and some interface circuitry will be required.
diff --git a/reference/DetachInterrupt.html b/reference/DetachInterrupt.html
index 22580cb..d8b2287 100644
--- a/reference/DetachInterrupt.html
+++ b/reference/DetachInterrupt.html
@@ -66,10 +66,13 @@ a.varlink { text-decoration:none; }
<div id='wikitext'>
<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
</p>
-<p class='vspace'></p><h2>detachInterrupt(interrupt)</h2>
+<p class='vspace'></p><h2>detachInterrupt()</h2>
<h4>Description</h4>
<p>Turns off the given interrupt.
</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>detachInterrupt(interrupt)
+</p>
<p class='vspace'></p><h4>Parameters</h4>
<p>interrupt: the number of interrupt to disable (0 or 1).
</p>
diff --git a/reference/Ethernet.html b/reference/Ethernet.html
index 73d2aed..180ea44 100644
--- a/reference/Ethernet.html
+++ b/reference/Ethernet.html
@@ -78,6 +78,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><ul><li><a class='wikilink' href='EthernetBegin.html'>begin()</a>
</li><li><a class='wikilink' href='EthernetLocalIP.html'>localIP()</a>
+</li><li><a class='wikilink' href='EthernetMaintain.html'>maintain()</a>
</li></ul><p class='vspace'></p><h4><span class='wikiword'>IPAddress</span> class</h4>
<p>The <span class='wikiword'>IPAddress</span> class works with local and remote IP addressing.
</p>
@@ -97,6 +98,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><ul><li><a class='wikilink' href='ClientConstructor.html'>Client</a>
<p class='vspace'></p></li><li><a class='wikilink' href='EthernetClient.html'>EthernetClient()</a>
+</li><li><a class='wikilink' href='IfEthernetClient.html'>if (EthernetClient)</a>
</li><li><a class='wikilink' href='ClientConnected.html'>connected()</a>
</li><li><a class='wikilink' href='ClientConnect.html'>connect()</a>
</li><li><a class='wikilink' href='ClientWrite.html'>write()</a>
diff --git a/reference/EthernetBegin.html b/reference/EthernetBegin.html
index eec3c9f..077b816 100644
--- a/reference/EthernetBegin.html
+++ b/reference/EthernetBegin.html
@@ -128,18 +128,20 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>With version 1.0, the library supports DHCP. Using Ethernet.begin(mac) with the proper network setup, the Ethernet shield will automatically obtain an IP address. This increases the sketch size significantly.
</p>
<p class='vspace'></p><h4>Syntax</h4>
-<p>Ethernet.begin(mac); <br />Ethernet.begin(mac, ip); <br />Ethernet.begin(mac, ip, gateway); <br />Ethernet.begin(mac, ip, gateway, subnet); <br />
+<p>Ethernet.begin(mac); <br />Ethernet.begin(mac, ip); <br />Ethernet.begin(mac, ip, dns); <br />Ethernet.begin(mac, ip, dns, gateway); <br />Ethernet.begin(mac, ip, dns, gateway, subnet); <br />
</p><h4>Parameters</h4>
<p><strong>mac</strong>: the MAC (Media access control) address for the device (array of 6 bytes). this is the Ethernet hardware address of your shield. Newer Arduino Ethernet Shields include a sticker with the device's MAC address. For older shields, choose your own.
</p>
<p class='vspace'></p><p><strong>ip</strong>: the IP address of the device (array of 4 bytes)
</p>
+<p class='vspace'></p><p><strong>dns</strong>: the address for a DNS server.
+</p>
<p class='vspace'></p><p><strong>gateway</strong>: the IP address of the network gateway (array of 4 bytes). optional: defaults to the device IP address with the last octet set to 1
</p>
<p class='vspace'></p><p><strong>subnet</strong>: the subnet mask of the network (array of 4 bytes). optional: defaults to 255.255.255.0
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>None
+<p>The DHCP version of this function, Ethernet.begin(mac), returns an int: 1 on a successful DHCP connection, 0 on failure. The other versions don't return anything.
</p>
<p class='vspace'></p><h4>Example</h4>
<p>
diff --git a/reference/EthernetMaintain.html b/reference/EthernetMaintain.html
new file mode 100644
index 0000000..96bfc2a
--- /dev/null
+++ b/reference/EthernetMaintain.html
@@ -0,0 +1,106 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - EthernetMaintain </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='Ethernet.html'>Ethernet</a>
+</p>
+<p class='vspace'></p><h2>Ethernet.maintain()</h2>
+<h4>Description</h4>
+<p>Allows for the renewal of DHCP leases. When assigned an IP address via DHCP, ethernet devices are given a lease on the address for an amount of time. With Ethernet.maintain(), it is possible to request a renewal from the DHCP server. Depending on the server's configuration, you may receive the same address, a new one, or none at all.
+</p>
+<p class='vspace'></p><p>Ethernet.maintain() was added to Arduino 1.0.1.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Ethernet.maintain();
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>byte:<br /> 0: nothing happened<br /> 1: renew failed<br /> 2: renew success<br /> 3: rebind fail<br /> 4: rebind success<br />
+<br /><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/FAQ.html b/reference/FAQ.html
index bb7ee2c..eeab056 100644
--- a/reference/FAQ.html
+++ b/reference/FAQ.html
@@ -76,8 +76,8 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p></div><div class="question">Who makes Arduino boards?
<p class='vspace'></p></div><div class="answer">Most of the official Arduino boards are manufactured by <span class='wikiword'>SmartProjects</span> in Italy. The Arduino Pro, Pro Mini, and <span class='wikiword'>LilyPad</span> are manufactured by <span class='wikiword'>SparkFun</span> Electronics (a US company). The Arduino Nano is manufactured by Gravitech (also a US company).
<p class='vspace'></p></div><div class="question">Which are the official Arduino boards?
-<p class='vspace'></p></div><div class="answer">The official Arduino boards are the ones listed on the <a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>hardware page</a>: the Uno, Mega2560, Nano, Bluetooth (BT), <span class='wikiword'>LilyPad</span>, Mini, Pro, Pro Mini, and a few older models, along with the Ethernet, <span class='wikiword'>XBee</span>, motor, and prototyping shields. These are boards whose manufacturers work with the Arduino team to ensure a good user experience, compatibility with the Arduino software, and a quality product. In return for their status as official boards, the manufacturers pay a licensing fee to the Arduino team to support the further development of the project.
-<p>In general, we try to restrict use of the name "Arduino" to the official boards. If you find a product under a different name but described as "Arduino compatible", itâs probably not an official board and doesnât fund continued work on the project.
+<p class='vspace'></p></div><div class="answer">The official Arduino boards are the ones listed on the <a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>hardware page</a>. These are boards whose manufacturers work with the Arduino team to ensure a good user experience, compatibility with the Arduino software, and a quality product. In return for their status as official boards, the manufacturers pay a licensing fee to the Arduino team to support the further development of the project.
+<p class='vspace'></p><p>In general, we restrict use of the name "Arduino" to the official boards. If you find a product under a different name but described as "Arduino compatible", itâs probably not an official board and doesnât fund continued work on the project.
</p>
<p class='vspace'></p></div><div class="question">I want to design my own board; what should I do?
<p class='vspace'></p></div><div class="answer">The reference designs for the Arduino boards are available from the <a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>hardware</a> page. They're licensed under a Creative Commons Attribution Share-Alike license, so you are free to use and adapt them for your own needs without asking permission or paying a fee. If you're looking to make something of interest to the community, we'd encourage you to discuss your ideas on the <a class='urllink' href='http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?board=hwdev' rel='nofollow'>hardware development forum</a> so that potential users can offer suggestions.
diff --git a/reference/FileClose.html b/reference/FileClose.html
index 4eed0fa..dbfab98 100644
--- a/reference/FileClose.html
+++ b/reference/FileClose.html
@@ -69,7 +69,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p><a class='wikilink' href='SD.html'>SD</a> : <em>File</em> class
</p>
<p class='vspace'></p><h2>close()</h2>
-<p>Close the file, and ensure that any data written to it is physically saved to the SD card. Because the SD library support only one open file at a time, you must close a file before opening another one.
+<p>Close the file, and ensure that any data written to it is physically saved to the SD card.
</p>
<p class='vspace'></p><h4>Syntax</h4>
<p><em>file</em>.close()
diff --git a/reference/Guide_ArduinoLeonardo.html b/reference/Guide_ArduinoLeonardo.html
new file mode 100644
index 0000000..12019b3
--- /dev/null
+++ b/reference/Guide_ArduinoLeonardo.html
@@ -0,0 +1,233 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - ArduinoLeonardo </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<h2>Guide to the Arduino Leonardo</h2>
+<p>To connect the Arduino Leonardo to your computer, you'll need a Micro-B USB cable. This USB cable provides power and data to the board. When programming the Leonardo, you must choose <strong>Arduino Leonardo</strong> from the <strong>Tools > Board</strong> menu in the Arduino IDE.
+</p>
+<p class='vspace'></p><p>(:*toc:)
+</p>
+<p class='vspace'></p><h4> <strong>Differences from the Arduino Uno</strong></h4>
+<p>In general, you program and use the Leonardo as you would other Arduino boards. There are, however, a few important differences.
+</p>
+<p class='vspace'></p><h3>Single processor for sketches and USB communication.</h3>
+<p>The Leonardo differs from previous Arduino boards in that it uses a single microcontroller to both run your sketches and for USB communication with the computer. The Uno and other boards use separate microcontrollers for these two functions, meaning that the USB connection to the computer remains established regardless of the state of the main microcontroller. By combining these two functions onto a single processor, the Leonardo allows for more flexibility in its communication with the computer. It also helps to lower the cost of the board by removing the need for an additional processor.
+</p>
+<p class='vspace'></p><h3>Serial re-enumeration on reset.</h3>
+<p>Since the Leonardo does not have a dedicated chip to handle serial communication, it means that the serial port is <strong>virtual</strong> -- it's a software routine, both on your operating system, and on the Leonardo itself. Just as your computer creates an instance of the serial port driver when you plug in any Arduino, the Leonardo creates a serial instance whenever it runs its bootloader. The Leonardo is an instance of USB's <strong>Connected Device Class (CDC)</strong> driver.
+</p>
+<p class='vspace'></p><p>This means that every time you reset the board, the Leonardo's USB serial connection will be broken and re-established. The Leonardo will disappear from the list of serial ports, and the list will re-enumerate. Any program that has an open serial connection to the Leonardo will lose its connection. This is in contrast to the Arduino Uno, with which you can reset the main processor (the <span class='wikiword'>ATmega328P</span>) without closing the USB connection (which is maintained by the secondary <span class='wikiword'>ATmega8U2</span> or <span class='wikiword'>ATmega16U2</span> processor). This difference has implications for driver installation, uploading, and communication; these are discussed below.
+</p>
+<p class='vspace'></p><h3>No reset when you open the serial port.</h3>
+<p>Unlike the Arduino Uno, the Leonardo doesn't restart your sketch when you open its serial port on the computer. That means you won't see serial data that's already been sent to the computer by the board, including, for example, most data sent in the setup() function.
+</p>
+<p class='vspace'></p><p>This change means that if you're using any Serial print(), println() or write() statments in your setup, they won't show up when you open the serial monitor. To work around this, you can check to see if the serial port is open like so:
+</p>
+<p class='vspace'></p><p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="co1">// while the serial stream is not open, do nothing:</span><br />
+ <span class="kw1">while</span> <span class="br0">(</span><span class="sy0">!</span><span class="kw1">Serial</span><span class="br0">)</span> <span class="sy0">;</span></div></div>
+ <div class='sourceblocklink'><a href='Guide_ArduinoLeonardo?action=sourceblock&num=1.html' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h3>Keyboard and mouse emulation.</h3>
+<p>One advantage of using a single chip for your sketches and for USB is increased flexibility in the communication with the computer. While the Leonardo appears as a virtual serial port to your operating system (also called CDC) for programming and communication (as with the Arduino Uno), it can also behave as a (HID) keyboard or mouse. See the "Good Coding Practice" section below for a warning about using this functionality.
+</p>
+<p class='vspace'></p><h3>Separation of USB and serial communication.</h3>
+<p>On the Leonardo, the main <strong>Serial</strong> class refers to the virtual serial driver on the Leonardo for connection to your computer over USB. It's not connected to the physical pins 0 and 1 as it is on the Uno and earlier boards. To use the hardware serial port (pins 0 and 1, RX and TX), use <strong>Serial1</strong>. (See the <a class='wikilink' href='Serial.html'>Serial reference pages</a> for more information.)
+</p>
+<p class='vspace'></p><h3>Differences in pin capabilities.</h3>
+<p>The Leonardo has some slight differences in the capabilities and assignments of various pins (especially for SPI and TWI). These are detailed on the <a class='wikilink' href='http://arduino.cc/en/Main/ArduinoBoardLeonardo'>hardware page</a>.
+</p>
+<p class='vspace'></p><h4> <strong>Installing Drivers for the Leonardo</strong></h4>
+<h3>OSX</h3>
+<ul><li>The first time you plug a Leonardo into a Mac, the "Keyboard Setup Assistant" will launch. There's nothing to configure with the Leonardo, so you can close this dialogue by clicking the red button in the top left of the window.
+</li></ul><p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/OSXKeyboardNotification.png' alt='' title='' /></div>
+<p class='vspace'></p><h3>Windows (tested on XP and 7)<br /></h3>
+<p>The process for Windows XP and Windows 7 is similar. These screenshots are from an XP installation. <br />
+</p><ul><li>Plug in your board and wait for Windows to begin its driver installation process. If the installer does not launch automatically, Navigate to the Windows Device Manager (Start>Control Panel>Hardware) and find the Arduino Leonardo listing. Right click and choose <strong>Update driver</strong>.
+</li><li>If prompted to search for drivers online, choose "No, not this time". And click <strong>Next</strong>
+</li></ul><div><img src='http://arduino.cc/en/uploads/Guide/LeonardoWindowsDrivers1.png' alt='' title='' /></div>
+<ul><li>When asked to install automatically or from a specific location, select "Install from a list or specific location" and press <strong>Next</strong>
+</li></ul><div><img src='http://arduino.cc/en/uploads/Guide/LeonardoWindowsDrivers2.png' alt='' title='' /></div>
+<ul><li>Choose "Search for the best driver in these locations", and check the box "incude this location in the search". Click the <strong>Browse</strong> button and navigate to your Arduino 1.0.1 or later installation. Select the <strong>drivers</strong> folder an click <strong>OK</strong>
+</li></ul><div><img src='http://arduino.cc/en/uploads/Guide/LeonardoWindowsDrivers3.png' alt='' title='' /></div>
+<ul><li>Click <strong>Next</strong>
+</li><li>You will receive a notification that the Leonardo has not passed Windows Logo testing. Click on the button <strong>Continue Anyway</strong>
+</li></ul><div><img src='http://arduino.cc/en/uploads/Guide/LeonardoWindowsDrivers5.png' alt='' title='' /></div>
+<dl><dd><ul><li>After a few moments, a window will tell you the wizard has finished installing software for Arduino Leonardo. Press the <strong>Finish</strong> button
+</li></ul></dd></dl><p class='vspace'></p><h3>Linux<br /></h3>
+<p>There is no need to install drivers for Ubuntu 10.0.4
+</p>
+<p class='vspace'></p><h4> <strong>Uploading Code to the Leonardo</strong></h4>
+<p>In general, you upload code to the Leonardo as you would with the Uno or other Arduino boards. Click the upload button in the Arduino software and your sketch will be automatically uploaded onto the Leonardo and then started. This works more or less the same way as with the Uno: the Arduino software initiates a reset of the Leonardo, launching the bootloader - which is responsible for receiving, storing, and starting the new sketch.
+</p>
+<p class='vspace'></p><p>However, because the Leonardo's serial port is virtual, it disappears when the boards resets, the Arduino software uses a different strategy for timing the upload than with the Uno and other boards. In particular, after initiating the auto-reset of the Leonardo (using the serial port selected in the <strong>Tools > Serial Port</strong> menu), the Arduino software waits for a new virtual (CDC) serial / COM port to appear - one that it assumes represents the Leonardo bootloader. It then performs the upload on this newly-appeared port.
+</p>
+<p class='vspace'></p><p>These differences affect the way you use the physical reset button to perform an upload if the auto-reset isn't working. Press and hold the reset button on the Leonardo, <em>then</em> hit the upload button in the Arduino software. Only release the reset button after you see the message "Uploading..." appear in the software's status bar. When you do so, the bootloader will start, creating a new virtual (CDC) serial port on the computer. The software will see that port appear and perform the upload using it. Again, this is only necessary if the normal upload process (i.e. just pressing the uploading button) doesn't work. (Note that the auto-reset is initiated when the computer opens the Leonardo's serial port at 1200 baud and then closes it; this won't work if something interferes with the board's USB communication - e.g. disabling interrupts.)
+</p>
+<p class='vspace'></p><h4><strong>Good Coding Practice With the Leonardo</strong></h4>
+<p><strong>A word of caution on using the Leonardo as a Mouse or Keyboard</strong>: if the Mouse or Keyboard library is constantly running, it will be difficult to program your board. Functions such as Mouse.move() and Keyboard.print() will move your cursor or send keystrokes to a connected computer and should only be called when you are ready to handle them. It is recommended to use a control system to turn this functionality on, like a physical switch or only responding to specific input you can control. When using the Mouse or Keyboard library, it may be best to test your output first using Serial.print(). This way, you can be sure you know what values are being reported. Refer to the Mouse and Keyboard examples for some ways to handle this.
+</p>
+<p class='vspace'></p><p><strong>Using the serial monitor effectively</strong>: Since serial is going through only one processor on the Leonardo, the board is capable of filling your computer's serial buffer faster than the Uno or earlier boards. You may notice that if you send serial continually, for example like this:
+</p>
+<p class='vspace'></p><p>
+<div class='sourceblock ' id='sourceblock2'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">int</span> sensorReading <span class="sy0">=</span> <span class="kw1">analogRead</span><span class="br0">(</span>A0<span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">println</span><span class="br0">(</span>sensorReading<span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='Guide_ArduinoLeonardo?action=sourceblock&num=2.html' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><p>the Serial Monitor in the IDE slows down considerably as it tries to keep up. If you encounter this, add a short delay to your loop so that the computer's serial buffer is not filled as fast. Even a millisecond delay will help:
+</p>
+<p class='vspace'></p><p>
+<div class='sourceblock ' id='sourceblock3'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">int</span> sensorReading <span class="sy0">=</span> <span class="kw1">analogRead</span><span class="br0">(</span>A0<span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">println</span><span class="br0">(</span>sensorReading<span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='Guide_ArduinoLeonardo?action=sourceblock&num=3.html' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><p>Serial applications using native libraries other than RXTX library read the serial buffer faster, so you may not encounter this error much outside of the Serial Monitor, Processing, or other RXTX-based serial applications
+</p>
+<p class='vspace'></p><p>For more details on the Arduino Leonardo, see the <a class='wikilink' href='http://arduino.cc/en/Main/ArduinoBoardLeonardo'>hardware page</a> and the <a class='wikilink' href='MouseKeyboard.html'>Mouse and Keyboard reference pages</a>.
+<br /><br />The text of the Arduino getting started guide is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the guide are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Guide_ArduinoLeonardo?action=edit.html'>Edit Page</a> | <a href='Guide_ArduinoLeonardo?action=diff.html'>Page History</a> | <a href='Guide_ArduinoLeonardo?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Guide_ArduinoMini.html b/reference/Guide_ArduinoMini.html
index 7bc8d10..783a60c 100644
--- a/reference/Guide_ArduinoMini.html
+++ b/reference/Guide_ArduinoMini.html
@@ -71,13 +71,13 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p></li><li>You need to select <strong>Arduino Mini</strong> from the <strong>Tools | Board</strong> menu of the Arduino environment.
<p class='vspace'></p></li><li>To upload a new sketch to the Arduino Mini, you need to press the reset button on the board immediately before pressing the upload button in the Arduino environment.
</li></ul><p class='vspace'></p><h3>Information about the Arduino Mini</h3>
-<p>The microcontroller (an <span class='wikiword'>ATmega168</span>) on the Arduino Mini is a physically smaller version of the chip on the USB Arduino boards, with the following small difference:
+<p>The microcontroller (an <span class='wikiword'>ATmega328</span>) on the Arduino Mini is a physically smaller version of the chip on the USB Arduino boards, with the following small difference:
</p>
<p class='vspace'></p><ul><li>There are two extra analog inputs on the Mini (8 total). Four of these, however, are not connected to the legs that come on the Arduino Mini, requiring you to solder wires to their holes to use them. Two of these unconnected pins are also used by the Wire library (<span class='wikiword'>I2C</span>), meaning that its use will require soldering as well.
</li></ul><p class='vspace'></p><p>Also, the Arduino Mini is more <strong>fragile and easy to break</strong> than a regular Arduino board.
</p>
-<p class='vspace'></p><ul><li>Don't connect more than 9 volts to the +9V pin or reverse the power and ground pins of your power supply, or you might kill the <span class='wikiword'>ATmega168</span> on the Arduino Mini.
-<p class='vspace'></p></li><li>You can't remove the <span class='wikiword'>ATmega168</span>, so if you kill it, you need a new Mini.
+<p class='vspace'></p><ul><li>Don't connect more than 9 volts to the +9V pin or reverse the power and ground pins of your power supply, or you might kill the <span class='wikiword'>ATmega328</span> on the Arduino Mini.
+<p class='vspace'></p></li><li>You can't remove the <span class='wikiword'>ATmega328</span>, so if you kill it, you need a new Mini.
</li></ul><p class='vspace'></p><p><a name='connecting' id='connecting'></a>
</p><h3>Connecting the Arduino Mini</h3>
<p>Here's a diagram of the pin layout of the Arduino Mini:
@@ -89,7 +89,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p></td><td width='50%' valign='top'>
<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/arduino_mini04_pinout.png' alt='' title='' /></div>
-<p class='vspace'></p><p><em>Mini 04 pinout</em> (the ground on the left has moved down one pin)
+<p class='vspace'></p><p><em>Mini 04 and 05 pinout</em> (the ground on the left has moved down one pin)
</p>
<p class='vspace'></p></td></tr></table>
<p class='vspace'></p><p>To use the Arduino Mini, you need to connect:
@@ -102,9 +102,12 @@ a.varlink { text-decoration:none; }
</li></ul><p class='vspace'></p><p>You have a few options for connecting the board: the Mini USB Adapter, a regular Arduino board, or your own power supply and USB/Serial adapter.
</p>
<p class='vspace'></p><h4>Connecting the Arduino Mini and Mini USB Adapter</h4>
-<p>Here is a photo showing the Arduino Mini connected to the Mini USB adapter. Notice that the reset pin is connected directly to +5V (the orange wire), without a pushbutton. Thus, to reset the Arduino Mini, you will need to unplug and reconnect the USB cable to the Mini USB Adapter, or manually move the orange wire connected to the reset pin from +5V to ground and back.
+<p>The circuit shown here is the basic setup for an Arduino mini connected to a USB-to-serial converter. You can see power and ground from the USB are run to the rails of the breadboard so it's convenient for the other components on the board. The 0.1uF capacitor from the reset pin is connected to the RTS pin on the mini USB adaptor. This enables auto-reset when the serial port is opened, meaning you don't have to press the reset button every time you upload new code. If it gives you problems, you can remove it, and press reset every time.
</p>
-<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/ArduinoMiniBreadboardPhoto.jpg' alt='' title='' /></div>
+<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/ArduinoMiniBreadboardPhoto3.jpg' alt='' title='' /></div>
+<p class='vspace'></p><p>You can use a <span class='wikiword'>USBSerial</span> connector wired up in a similar fashion :
+</p>
+<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/ArduinoMiniUSBSerialLite.jpg' alt='' title='' /></div>
<p class='vspace'></p><h4>Connecting the Arduino Mini and a regular Arduino</h4>
<p>Here's a photo of the Arduino Mini connected to an Arduino NG. The NG has its <span class='wikiword'>ATmega8</span> removed and is being used for its USB connection, power source, and reset button. Thus, you can reset the Arduino Mini just by pressing the button on the NG.
</p>
diff --git a/reference/Guide_ArduinoWirelessShield.html b/reference/Guide_ArduinoWirelessShield.html
new file mode 100644
index 0000000..88d0ba3
--- /dev/null
+++ b/reference/Guide_ArduinoWirelessShield.html
@@ -0,0 +1,229 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - ArduinoWirelessShield </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<h2>Arduino Wireless Shield with the <span class='wikiword'>XBee</span> 802.15.4 modules</h2>
+<p>The Arduino Wireless shield allows your Arduino board to communicate wirelessly using Zigbee. This documentation describes the use of the shield with the <span class='wikiword'>XBee</span> 802.15.4 module (sometimes called "Series 1" to distinguish them from the Series 2 modules, although "Series 1" doesn't appear in the official name or product description).
+</p>
+<p class='vspace'></p><h3>A Simple Example</h3>
+<p>You should be able to get two Arduino boards with Wireless shields talking to each other without any configuration, using just the standard Arduino serial commands (described in the <a class='wikilink' href='index.html'>reference</a>).
+</p>
+<p class='vspace'></p><p>To upload a sketch to an Arduino board with a Wireless shield, remove the Xbee. Then, you can upload a sketch normally from the Arduino environment. In this case, upload the <strong>Communication | Physical Pixel</strong> sketch to one of the boards. This sketch instructs the board to turn on the LED attached to pin 13 whenever it receives an 'H' over its serial connection, and turn the LED off when it gets an 'L'. You can test it by connecting to the board with the Arduino serial monitor (be sure it's set at 9600 baud), typing an H, and pressing enter (or clicking send). The LED should turn on. Send an L and the LED should turn off. If nothing happens, you may have an Arduino board that doesn't have a built-in LED on pin 13 (see the <a class='wikilink' href='http://arduino.cc/en/Main/Boards'>board index</a> to check for sure), in this case you'll need to supply your own.
+</p>
+<p class='vspace'></p><p>Once you've uploaded the Physical Pixel sketch and made sure that it's working, unplug the first Arduino board from the computer. Change the switch to the Micro setting. Now, you need to upload a sketch to the other board. Make sure its switch is in the USB setting. Then upload the following sketch to the board:
+</p>
+<p class='vspace'></p><p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
+<span class="br0">{</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><br />
+<span class="br0">{</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">print</span><span class="br0">(</span><span class="st0">'H'</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">print</span><span class="br0">(</span><span class="st0">'L'</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='Guide_ArduinoWirelessShield?action=sourceblock&num=1.html' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><p>When it's finished uploading, you can check that it's working with the Arduino serial monitor. You should see H's and L's arriving one a second. Turn off the serial monitor and unplug the board. Change the switch to the Micro setting. Now connect both boards to power. After a few seconds, you should see the LED on the first board turn on and off, once a second. (This is the LED on the Arduino board itself, not the one on the Xbee shield, which conveys information about the state of the Xbee module.) If so, congratulations, your Arduino boards are communicating wirelessly.
+</p>
+<p class='vspace'></p><h3>A Few Notes</h3>
+<p>You can use any of the standard Arduino serial commands with the Xbee shield. With the switch in the Micro position, the print and println commands will send data over the Xbee shield and the USB connection (i.e. to other Xbee shields and to the computer at the same time). In this configuration, however, the board will only receive data from the Xbee shield not from the USB connection.
+</p>
+<p class='vspace'></p><p>The Xbee module on the shield is set up to work at 9600 baud by default, so unless you reconfigure it, you'll need to make sure you're passing 9600 to the Serial.begin() command in your sketch.
+</p>
+<p class='vspace'></p><p>To allow your computer to communicate directly with the Xbee shield, connect it to an Arduino board whose microcontroller has been removed and place the switch in the USB configuration. Then you can send data to and receive data from the Xbee module from any terminal program. This allows you, for example, to see the data that the module is receiving from other Xbee shields (e.g. to collect sensor data wirelessly from a number of locations).
+</p>
+<p class='vspace'></p><h3>Configuring the Xbee Module</h3>
+<p>You can configure the Xbee module from code running on the Arduino board or from software on the computer. To configure it from the Arduino board, you'll need to have the switch in the Micro position. To configure it from the computer, you'll need to have the switch in the USB position and have removed the microncontroller from your Arduino board.
+</p>
+<p class='vspace'></p><p>To get the module into configuration mode, you need to send it three plus signs: +++ and there needs to be at least one second before and after during which you send no other character to the module. Note that this includes newlines or carriage return characters. Thus, if you're trying to configure the module from the computer, you need to make sure your terminal software is configured to send characters as you type them, without waiting for you to press enter. Otherwise, it will send the plus signs immediately followed by a newline (i.e. you won't get the needed one second delay after the +++). If you successfully enter configuration mode, the module will send back the two characters 'OK', followed by a carriage return.
+</p>
+<p class='vspace'></p>
+<table width="60%"><tr><td width="50%" valign='top'> Send Command
+</td><td width="50%" valign='top'> Expected Response
+</td></tr><tr><td valign='top'> <code>+++</code>
+</td><td valign='top'> <code>OK</code><em><CR></em>
+</td></tr></table>
+<p class='vspace'></p><p>Once in configuration mode, you can send AT commands to the module. Command strings have the form <span class='wikiword'>ATxx</span> (where xx is the name of a setting). To read the current value of the setting, send the command string followed by a carriage return. To write a new value to the setting, send the command string, immediately followed by the new setting (with no spaces or newlines in-between), followed by a carriage return. For example, to read the network ID of the module (which determines which other Xbee modules it will communicate with), use the <em>'ATID</em> command:
+</p>
+<p class='vspace'></p>
+<table width="60%"><tr><td width="50%" valign='top'> Send Command
+</td><td width="50%" valign='top'> Expected Response
+</td></tr><tr><td valign='top'> <code>ATID</code><em><enter></em>
+</td><td valign='top'> <code>3332</code><em><CR></em>
+</td></tr></table>
+<p class='vspace'></p><p>To change the network ID of the module:
+</p>
+<p class='vspace'></p>
+<table width="60%"><tr><td width="50%" valign='top'> Send Command
+</td><td width="50%" valign='top'> Expected Response
+</td></tr><tr><td valign='top'> <code><span class='wikiword'>ATID3331</span></code><em><enter></em>
+</td><td valign='top'> <code>OK</code><em><CR></em>
+</td></tr></table>
+<p class='vspace'></p><p>Now, check that the setting has taken effect:
+</p>
+<p class='vspace'></p>
+<table width="60%"><tr><td width="50%" valign='top'> Send Command
+</td><td width="50%" valign='top'> Expected Response
+</td></tr><tr><td valign='top'> <code>ATID</code><em><enter></em>
+</td><td valign='top'> <code>3331</code><em><CR></em>
+</td></tr></table>
+<p class='vspace'></p><p>Unless you tell the module to write the changes to non-volatile (long-term) memory, they will only be in effect until the module loses power. To save the changes permanently (until you explicitly modify them again), use the <strong>ATWR</strong> command:
+</p>
+<p class='vspace'></p>
+<table width="60%"><tr><td width="50%" valign='top'> Send Command
+</td><td width="50%" valign='top'> Expected Response
+</td></tr><tr><td valign='top'> <code>ATWR</code><em><enter></em>
+</td><td valign='top'> <code>OK</code><em><CR></em>
+</td></tr></table>
+<p class='vspace'></p><p>To reset the module to the factory settings, use the <strong>ATRE</strong> command:
+</p>
+<p class='vspace'></p>
+<table width="60%"><tr><td width="50%" valign='top'> Send Command
+</td><td width="50%" valign='top'> Expected Response
+</td></tr><tr><td valign='top'> <code>ATRE</code><em><enter></em>
+</td><td valign='top'> <code>OK</code><em><CR></em>
+</td></tr></table>
+<p class='vspace'></p><p>Note that like the other commands, the reset will not be permanent unless you follow it with the <strong>ATWR</strong> comamand.
+</p>
+<p class='vspace'></p><h3>References</h3>
+<p>For more information, see: the <a class='wikilink' href='http://arduino.cc/en/Main/ArduinoWirelessShield'>hardware page</a> for the Xbee shield, and the <a class='urllink' href='http://www.digi.com/products/wireless-wired-embedded-solutions/zigbee-rf-modules/point-multipoint-rfmodules/' rel='nofollow'>Digi Xbee page</a>.
+The text of the Arduino getting started guide is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the guide are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Guide_ArduinoWirelessShield?action=edit.html'>Edit Page</a> | <a href='Guide_ArduinoWirelessShield?action=diff.html'>Page History</a> | <a href='Guide_ArduinoWirelessShield?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Guide_Environment.html b/reference/Guide_Environment.html
index 1c14a1f..c4b061c 100644
--- a/reference/Guide_Environment.html
+++ b/reference/Guide_Environment.html
@@ -67,7 +67,8 @@ a.varlink { text-decoration:none; }
<h2>Arduino Development Environment</h2>
<p>The Arduino development environment contains a text editor for writing code, a message area, a text console, a toolbar with buttons for common functions, and a series of menus. It connects to the Arduino hardware to upload programs and communicate with them.
</p>
-<p class='vspace'></p><p>Software written using Arduino are called <strong>sketches</strong>. These sketches are written in the text editor. Sketches are saved with the file extension .ino. It has features for cutting/pasting and for searching/replacing text. The message area gives feedback while saving and exporting and also displays errors. The console displays text output by the Arduino environment including complete error messages and other information. The bottom righthand corner of the window displays the current board and serial port. The toolbar buttons allow you to verify and upload programs, create, open, and save sketches, and open the serial monitor:
+<p class='vspace'></p><h3>Writing Sketches</h3>
+<p>Software written using Arduino are called <strong>sketches</strong>. These sketches are written in the text editor. Sketches are saved with the file extension .ino. It has features for cutting/pasting and for searching/replacing text. The message area gives feedback while saving and exporting and also displays errors. The console displays text output by the Arduino environment including complete error messages and other information. The bottom righthand corner of the window displays the current board and serial port. The toolbar buttons allow you to verify and upload programs, create, open, and save sketches, and open the serial monitor.
</p>
<p class='vspace'></p><p><strong>NB: Versions of the IDE prior to 1.0 saved sketches with the extension .pde. It is possible to open these files with version 1.0, you will be prompted to save the sketch with the .ino extension on save.</strong>
</p>
@@ -165,16 +166,29 @@ a.varlink { text-decoration:none; }
</p><h3>Preferences</h3>
<p>Some preferences can be set in the preferences dialog (found under the <strong>Arduino</strong> menu on the Mac, or <strong>File</strong> on Windows and Linux). The rest can be found in the preferences file, whose location is shown in the preference dialog.
</p>
+<p class='vspace'></p><p><a name='languages' id='languages'></a>
+</p><h3>Language Support</h3>
+<div><img src='http://arduino.cc/en/uploads/Guide/languagePreferences.png' alt='' title='' /> <br /></div>
+<p>The Arduino 1.0.1 software environment has been translated into 30+ different languages. By default, the IDE loads in the language selected by your operating system. (Note: on Windows and possibly Linux, this is determined by the locale setting which controls currency and date formats, not by the language the operating system is displayed in.)
+</p>
+<p class='vspace'></p><p>If you would like to change the language manually, start the Arduino software and open the <strong>Preferences</strong> window. Next to the <strong>Editor Language</strong> there is a dropdown menu of currently supported languages. Select your preferred language from the menu, and restart the software to use the selected language. If your preferred language is not supported, the IDE will default to English.
+</p>
+<p class='vspace'></p><p>You can return Arduino to its default setting of selecting its language based on your operating system by selecting <strong>System Default</strong> from the <strong>Editor Language</strong> drop-down. This setting will take effect when you restart the Arduino software. Similarly, after changing your operating system's settings, you must restart the Arduino software to update it to the new default language.
+</p>
<p class='vspace'></p><p><a name='boards' id='boards'></a>
</p><h3>Boards</h3>
<p>The board selection has two effects: it sets the parameters (e.g. CPU speed and baud rate) used when compiling and uploading sketches; and sets and the file and fuse settings used by the burn bootloader command. Some of the board definitions differ only in the latter, so even if you've been uploading successfully with a particular selection you'll want to check it before burning the bootloader.
</p>
<p class='vspace'></p><ul><li><em>Arduino Uno</em> <br clear='all' /> An <span class='wikiword'>ATmega328</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset, using the optiboot bootloader (115200 baud, 0.5 KB).
-<p class='vspace'></p></li><li><em>Arduino Duemilanove or Nano w/ <span class='wikiword'>ATmega328</span></em> <br clear='all' /> An <span class='wikiword'>ATmega328</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset.
-<p class='vspace'></p></li><li><em>Arduino Diecimila, Duemilanove, or Nano w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> An <span class='wikiword'>ATmega168</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset. Compilation and upload is equivalent to Arduino NG or older w/ <span class='wikiword'>ATmega168</span>, but the bootloader burned has a faster timeout (and blinks the pin 13 LED only once on reset).
-<p class='vspace'></p></li><li><em>Arduino Mega 2560</em> <br clear='all' /> An <span class='wikiword'>ATmega2560</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset, using an stk500v2 bootloader.
+<p class='vspace'></p></li><li><em>Arduino Duemilanove w/ <span class='wikiword'>ATmega328</span></em> <br clear='all' /> An <span class='wikiword'>ATmega328</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset.
+<p class='vspace'></p></li><li><em>Arduino Diecimila or Duemilanove w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> An <span class='wikiword'>ATmega168</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset. Compilation and upload is equivalent to Arduino NG or older w/ <span class='wikiword'>ATmega168</span>, but the bootloader burned has a faster timeout (and blinks the pin 13 LED only once on reset).
+<p class='vspace'></p></li><li><em>Arduino Nano w/ <span class='wikiword'>ATmega328</span></em> <br clear='all' /> An <span class='wikiword'>ATmega328</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset. Has eight analog inputs.
+<p class='vspace'></p></li><li><em>Arduino Nano w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> An <span class='wikiword'>ATmega168</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset. Compilation and upload is equivalent to Arduino NG or older w/ <span class='wikiword'>ATmega168</span>, but the bootloader burned has a faster timeout (and blinks the pin 13 LED only once on reset). Has eight analog inputs.
+<p class='vspace'></p></li><li><em>Arduino Mega 2560 or Mega ADK</em> <br clear='all' /> An <span class='wikiword'>ATmega2560</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset, using an stk500v2 bootloader.
<p class='vspace'></p></li><li><em>Arduino Mega (<span class='wikiword'>ATmega1280</span>)</em> <br clear='all' /> An <span class='wikiword'>ATmega1280</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset.
-<p class='vspace'></p></li><li><em>Arduino Mini</em> <br clear='all' /> Equivalent to Arduino NG or older w/ <span class='wikiword'>ATmega168</span> (i.e. an <span class='wikiword'>ATmega168</span> running at 16 <span class='wikiword'>MHz</span> without auto-reset).
+<p class='vspace'></p></li><li><em>Arduino Leonardo</em> <br clear='all' /> An <span class='wikiword'>ATmega32u4</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset.
+<p class='vspace'></p></li><li><em>Arduino Mini w/ <span class='wikiword'>ATmega328</span></em><br clear='all' /> An <span class='wikiword'>ATmega328</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset, using the optiboot bootloader (115200 baud, 0.5 KB). Has eight analog inputs.
+<p class='vspace'></p></li><li><em>Arduino Mini w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> Equivalent to Arduino NG or older w/ <span class='wikiword'>ATmega168</span> (i.e. an <span class='wikiword'>ATmega168</span> running at 16 <span class='wikiword'>MHz</span> without auto-reset).
<p class='vspace'></p></li><li><em>Arduino Ethernet</em> <br clear='all' /> Equivalent to Arduino UNO with an Ethernet shield.
<p class='vspace'></p></li><li><em>Arduino Fio</em> <br clear='all' /> An <span class='wikiword'>ATmega328</span> running at 8 <span class='wikiword'>MHz</span> with auto-reset. Equivalent to Arduino Pro or Pro Mini (3.3V, 8 <span class='wikiword'>MHz</span>) w/ <span class='wikiword'>ATmega328</span>.
<p class='vspace'></p></li><li><em>Arduino BT w/ <span class='wikiword'>ATmega328</span></em> <br clear='all' /> <span class='wikiword'>ATmega328</span> running at 16 <span class='wikiword'>MHz</span>. The bootloader burned (4 KB) includes codes to initialize the on-board bluetooth module.
@@ -183,7 +197,6 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p></li><li><em><span class='wikiword'>LilyPad</span> Arduino w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> An <span class='wikiword'>ATmega168</span> running at 8 <span class='wikiword'>MHz</span>. Compilation and upload is equivalent to the Arduino Pro or Pro Mini (8 <span class='wikiword'>MHz</span>) w/ <span class='wikiword'>ATmega168</span>. The bootloader burned, however, has a slower timeout (and blinks the pin 13 LED three times on reset) because the original versions of the <span class='wikiword'>LilyPad</span> didn't support auto-reset. They also didn't include an external clock, so the burn bootloader command configures the fuses of <span class='wikiword'>ATmega168</span> for an internal 8 <span class='wikiword'>MHz</span> clock. <br clear='all' /> <br clear='all' /> If you have a recent version of the <span class='wikiword'>LilyPad</span>, (w/ a 6-pin programming header), you'll want to select Arduino Pro or Pro Mini (
8 <span class='wikiword'>MHz</span>) w/ <span class='wikiword'>ATmega168</span> before burning the bootloader.
<p class='vspace'></p></li><li><em>Arduino Pro or Pro Mini (5V, 16 <span class='wikiword'>MHz</span>) w/ <span class='wikiword'>ATmega328</span></em> <br clear='all' /> An <span class='wikiword'>ATmega328</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset. Equivalent to Arduino Duemilanove or Nano w/ <span class='wikiword'>ATmega328</span>.
<p class='vspace'></p></li><li><em>Arduino Pro or Pro Mini (5V, 16 <span class='wikiword'>MHz</span>) w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> An <span class='wikiword'>ATmega168</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset. Equivalent to Arduino Diecimila, Duemilanove, or Nano w/ <span class='wikiword'>ATmega168</span>.
-<p class='vspace'></p></li><li><em>Arduino Diecimila, Duemilanove, or Nano w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> An <span class='wikiword'>ATmega168</span> running at 16 <span class='wikiword'>MHz</span> with auto-reset. Compilation and upload is equivalent to Arduino NG or older w/ <span class='wikiword'>ATmega168</span>, but the bootloader burned has a faster timeout (and blinks the pin 13 LED only once on reset). Also used for the 16 <span class='wikiword'>MHz</span> (5V) versions of the Arduino Pro and Pro Mini with an <span class='wikiword'>ATmega168</span>.
<p class='vspace'></p></li><li><em>Arduino Pro or Pro Mini (3.3V, 8 <span class='wikiword'>MHz</span>) w/ <span class='wikiword'>ATmega328</span></em> <br clear='all' /> An <span class='wikiword'>ATmega328</span> running at 8 <span class='wikiword'>MHz</span> (3.3V) with auto-reset. Equivalent to <span class='wikiword'>LilyPad</span> Arduino w/ <span class='wikiword'>ATmega328</span>.
<p class='vspace'></p></li><li><em>Arduino Pro or Pro Mini (3.3V, 8 <span class='wikiword'>MHz</span>) w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> An <span class='wikiword'>ATmega168</span> running at 8 <span class='wikiword'>MHz</span> (3.3V) with auto-reset.
<p class='vspace'></p></li><li><em>Arduino NG or older w/ <span class='wikiword'>ATmega168</span></em> <br clear='all' /> An <span class='wikiword'>ATmega168</span> running at 16 <span class='wikiword'>MHz</span> <em>without</em> auto-reset. Compilation and upload is equivalent to Arduino Diecimila or Duemilanove w/ <span class='wikiword'>ATmega168</span>, but the bootloader burned has a slower timeout (and blinks the pin 13 LED three times on reset).
diff --git a/reference/Guide_MacOSX.html b/reference/Guide_MacOSX.html
index a992168..aac053d 100644
--- a/reference/Guide_MacOSX.html
+++ b/reference/Guide_MacOSX.html
@@ -78,9 +78,8 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><h3>2 | Download the Arduino environment</h3>
<p>Get the latest version from the <a class='wikilink' href='http://arduino.cc/en/Main/Software'>download page</a>.
</p>
-<p class='vspace'></p><p>The disk image (.dmg) should mount automatically. If it doesn't, double-click it. It should look like the following image.
+<p class='vspace'></p><p>When the download is finished, double click the .zip fle. This will expand the Arduino application.
</p>
-<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/ArduinoDiskImage.png' alt='' title='' /></div>
<p class='vspace'></p><h3>3 | Install the Software</h3>
<p>Copy the Arduino application into the Applications folder (or elsewhere on your computer).
If you're using an Arduino Uno or Mga 2560, you don't have any drivers to install. Skip ahead to the next step.
@@ -88,7 +87,7 @@ If you're using an Arduino Uno or Mga 2560, you don't have any drivers to instal
<p class='vspace'></p><p>If you're using an older board (Duemilanove, Diecimila, or any board with an FTDI driver chip that looks like this:
</p>
<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/FTDIChip.png' alt='' title='' /></div>
-<p class='vspace'></p><p>you will need to install the drivers for the FTDI chip on the board. Double-click the <strong><span class='wikiword'>FTDIUSBSerialDriver</span>_10_4_10_5_10_6.mpkg</strong> icon and follow the instructions in the installer. You'll need to restart your computer after installing the drivers. (The latest version of the drivers can be found on the <a class='urllink' href='http://www.ftdichip.com/Drivers/VCP.htm' rel='nofollow'>FTDI website</a>.)
+<p class='vspace'></p><p>you will need to install the drivers for the FTDI chip on the board. You need to download the latest version of the drivers from the <a class='urllink' href='http://www.ftdichip.com/Drivers/VCP.htm' rel='nofollow'>FTDI website</a>. One downloaded, double click the package, and follow the instructions in the installer. You'll need to restart your computer after installing the drivers.
</p>
<p class='vspace'></p><h3>4 | Connect the board</h3>
<p>The Arduino Uno, Mega, Duemilanove and Arduino Nano automatically draw power from either the USB connection to the computer or an external power supply. If you're using an Arduino Diecimila, you'll need to make sure that the board is configured to draw power from the USB connection. The power source is selected with a jumper, a small piece of plastic that fits onto two of the three pins between the USB and power jacks. Check that it's on the two pins closest to the USB port.
@@ -98,12 +97,12 @@ If you're using an Arduino Uno or Mga 2560, you don't have any drivers to instal
<p class='vspace'></p><p>If you're using the Arduino Uno or Arduino Mega 2560, a dialog box will appear telling you that a new network interface has been detected. Click "Network Preferences...", and when it opens, simply click "Apply". The Uno or Mega 2560 will show up as "Not Configured", but it's working properly. Quit System Preferences.
</p>
<p class='vspace'></p><h3>5 | Launch the Arduino application</h3>
-<p>Double-click the Arduino application.
+<p>Double-click the Arduino application. (Note: if the Arduino software loads in the wrong language, you can change it in the preferences dialog. See <a class='wikilink' href='Guide_Environment#languages.html'>the environment page</a> for details.)
</p>
<p class='vspace'></p><h3>6 | Open the blink example</h3>
<p>Open the LED blink example sketch: <strong>File > Examples > 1.Basics > Blink</strong>.
</p>
-<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/Arduino0018Blink.png' alt='' title='' /></div>
+<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/Arduino1Blink.png' alt='' title='' /></div>
<p class='vspace'></p><h3>7 | Select your board</h3>
<p>You'll need to select the entry in the <strong>Tools > Board</strong> menu that corresponds to your Arduino.
</p>
diff --git a/reference/Guide_Troubleshooting.html b/reference/Guide_Troubleshooting.html
index a3b311e..f41f531 100644
--- a/reference/Guide_Troubleshooting.html
+++ b/reference/Guide_Troubleshooting.html
@@ -74,7 +74,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p><em>Arduino Software</em>
</p>
<p class='vspace'></p><ul><li>Make sure you have the right item selected in the <strong>Tools > Board</strong> menu. If you have an Arduino Uno, you'll need to choose it. Also, newer Arduino Duemilanove boards come with an <span class='wikiword'>ATmega328</span>, while older ones have an <span class='wikiword'>ATmega168</span>. To check, read the text on the microcontroller (the larger chip) on your Arduino board. For more information on the board menu items, see the <a class='wikilink' href='Guide_Environment.html'>guide to the Arduino environment</a>.
-<p class='vspace'></p></li><li>Then, check that the proper port is selected in the "Tools > Serial Port" menu (if your port doesn't appear, restart the IDE with the board connected to the computer). If you don't seem to have a serial port for your Arduino board, see the following information about drivers.
+<p class='vspace'></p></li><li>Then, check that the proper port is selected in the <strong>Tools > Serial Port</strong> menu (if your port doesn't appear, try restarting the IDE with the board connected to the computer). On the Mac, the serial port should be something like /dev/tty.usbmodem621 (for the Uno or Mega 2560) or /dev/tty.usbserial-A02f8e (for older, FTDI-based boards). On Linux, it should be /dev/ttyACM0 or similar (for the Uno or Mega 2560) or /dev/ttyUSB0 or similar (for older boards). On Windows, it will be a COM port but you'll need to check in the Device Manager (under Ports) to see which one. If you don't seem to have a serial port for your Arduino board, see the following information about drivers.
</li></ul><p class='vspace'></p><p><em>Drivers</em>
</p>
<p class='vspace'></p><p>Drivers provide a way for software on your computer (i.e. the Arduino software) to talk to hardware you connect to your computer (the Arduino board). In the case of Arduino, the drivers work by providing a virtual serial port (or virtual COM port). The Arduino Uno and Mega 2560 use standard drivers (USB CDC) provided by the operating system to communicate with the <span class='wikiword'>ATmega8U2</span> on the board. Other Arduino boards use FTDI drivers to communicate with the FTDI chip on the board (or in the USB-serial convertor).
diff --git a/reference/Guide_Windows.html b/reference/Guide_Windows.html
index 2f9f899..6ecde3e 100644
--- a/reference/Guide_Windows.html
+++ b/reference/Guide_Windows.html
@@ -113,12 +113,12 @@ a.varlink { text-decoration:none; }
</li></ul><p class='vspace'></p><p>You can check that the drivers have been installed by opening the Windows Device Mananger (in the Hardware tab of System control panel). Look for a "USB Serial Port" in the Ports section; that's the Arduino board.
</p>
<p class='vspace'></p><h3>5 | Launch the Arduino application</h3>
-<p>Double-click the Arduino application.
+<p>Double-click the Arduino application. (Note: if the Arduino software loads in the wrong language, you can change it in the preferences dialog. See <a class='wikilink' href='Guide_Environment#languages.html'>the environment page</a> for details.)
</p>
<p class='vspace'></p><h3>6 | Open the blink example</h3>
<p>Open the LED blink example sketch: <strong>File > Examples > 1.Basics > Blink</strong>.
</p>
-<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/Arduino0018Blink.png' alt='' title='' /></div>
+<p class='vspace'></p><div><img src='http://arduino.cc/en/uploads/Guide/Arduino1Blink.png' alt='' title='' /></div>
<p class='vspace'></p><h3>7 | Select your board</h3>
<p>You'll need to select the entry in the <strong>Tools > Board</strong> menu that corresponds to your Arduino.
</p>
diff --git a/reference/Guide_index.html b/reference/Guide_index.html
index a9783e5..458c74c 100644
--- a/reference/Guide_index.html
+++ b/reference/Guide_index.html
@@ -73,23 +73,24 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><ul><li><a class='wikilink' href='Guide_Windows.html'>Windows</a>
</li><li><a class='wikilink' href='Guide_MacOSX.html'>Mac OS X</a>
</li><li><a class='urllink' href='http://www.arduino.cc/playground/Learning/Linux' rel='nofollow'>Linux</a> (on the playground wiki)
-</li></ul><p class='vspace'></p><p><a class='wikilink' href='Guide_Environment.html'>Environment</a>: Description of the Arduino development environment.
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='Guide_Environment.html'>Environment</a>: Description of the Arduino development environment and how to change the default language.
</p>
<p class='vspace'></p><p><a class='wikilink' href='Guide_Troubleshooting.html'>Troubleshooting</a>: Advice on what to do if things don't work.
</p>
<p class='vspace'></p></td><td width='33%' valign='top'>
<p class='vspace'></p><p>Instructions for other boards:
</p>
-<p class='vspace'></p><ul><li><a class='wikilink' href='Guide_ArduinoNano.html'>Arduino Nano</a>
-</li><li><a class='wikilink' href='Guide_ArduinoMini.html'>Arduino Mini</a>
-</li><li><a class='wikilink' href='Guide_ArduinoBT.html'>Arduino BT</a>
-</li><li><a class='wikilink' href='Guide_ArduinoLilyPad.html'>LilyPad Arduino</a>
+<p class='vspace'></p><ul><li><a class='wikilink' href='Guide_ArduinoBT.html'>Arduino BT</a>
</li><li><a class='wikilink' href='http://arduino.cc/en/Main/ArduinoBoardFioProgramming'>Arduino Fio</a>
+</li><li><a class='wikilink' href='Guide_ArduinoLeonardo.html'>Arduino Leonardo</a>
+</li><li><a class='wikilink' href='Guide_ArduinoLilyPad.html'>LilyPad Arduino</a>
+</li><li><a class='wikilink' href='Guide_ArduinoMini.html'>Arduino Mini</a>
+</li><li><a class='wikilink' href='Guide_ArduinoNano.html'>Arduino Nano</a>
</li><li><a class='wikilink' href='Guide_ArduinoPro.html'>Arduino Pro</a>
</li><li><a class='wikilink' href='Guide_ArduinoProMini.html'>Arduino Pro Mini</a>
-<p class='vspace'></p></li><li><a class='wikilink' href='Guide_ArduinoXbeeShield.html'>Xbee shield</a>
-</li><li><a class='wikilink' href='Guide_ArduinoEthernetShield.html'>Ethernet shield</a>
-</li></ul><p class='vspace'></p></td></tr></table>
+<p class='vspace'></p></li><li><a class='wikilink' href='Guide_ArduinoEthernetShield.html'>Ethernet shield</a>
+</li><li><a class='wikilink' href='Guide_ArduinoWirelessShield.html'>Wireless shield</a>
+</li></ul></td></tr></table>
<p>The text of the Arduino getting started guide is licensed under a
<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the guide are released into the public domain.
</p>
diff --git a/reference/KeyboardBegin.html b/reference/KeyboardBegin.html
new file mode 100644
index 0000000..b87991b
--- /dev/null
+++ b/reference/KeyboardBegin.html
@@ -0,0 +1,188 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardBegin </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>MouseKeyboard</a>
+</p>
+<p class='vspace'></p><h2>Keyboard.begin()</h2>
+<h4>Description</h4>
+<p>When used with the Leonardo board, Keyboard.begin() starts emulating a keyboard connected to a computer. To end control, use <a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>().
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Keyboard.begin()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>nothing
+</p>
+<p class='vspace'></p><h3>Example</h3>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// make pin 2 an input and turn on the </span><br />
+ <span class="co1">// pullup resistor so it goes high unless</span><br />
+ <span class="co1">// connected to ground:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> INPUT_PULLUP<span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">//if the button is pressed</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span><span class="sy0">==</span><span class="kw2">LOW</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//Send the message</span><br />
+ Keyboard.<span class="kw1">print</span><span class="br0">(</span><span class="st0">"Hello!"</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardPrint.html'>Keyboard.print</a>()
+</li><li><a class='wikilink' href='KeyboardPrintln.html'>Keyboard.println</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li><li><a class='wikilink' href='KeyboardWrite.html'>Keyboard.write</a>()
+</li></ul><p class='vspace'></p><p><br /><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/KeyboardEnd.html b/reference/KeyboardEnd.html
new file mode 100644
index 0000000..b89ee05
--- /dev/null
+++ b/reference/KeyboardEnd.html
@@ -0,0 +1,185 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardEnd </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>MouseKeyboard</a>
+</p>
+<p class='vspace'></p><h2>Keyboard.end()</h2>
+<h4>Description</h4>
+<p>Stops the Leonardo emulating a keyboard connected to the computer. To start keyboard emulation, use <a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>().
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Keyboard.end()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>nothing
+</p>
+<p class='vspace'></p><h3>Example</h3>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">//start keyboard communication</span><br />
+ Keyboard.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//send a keystroke</span><br />
+ Keyboard.<span class="kw1">print</span><span class="br0">(</span><span class="st0">"Hello!"</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//end keyboard communication</span><br />
+ Keyboard.<span class="kw1">end</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">//do nothing</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardPrint.html'>Keyboard.print</a>()
+</li><li><a class='wikilink' href='KeyboardPrintln.html'>Keyboard.println</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li><li><a class='wikilink' href='KeyboardWrite.html'>Keyboard.write</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/KeyboardModifiers.html b/reference/KeyboardModifiers.html
new file mode 100644
index 0000000..c1dbca6
--- /dev/null
+++ b/reference/KeyboardModifiers.html
@@ -0,0 +1,216 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardModifiers </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h4>Keyboard Modifiers</h4>
+<p>The Keyboard.write() and Keyboard.press() and Keyboard.release() commands donât work with every possible ASCII character, only those that correspond to a key on the keyboard. For example, backspace works, but many of the other non-printable characters produce unpredictable results. For capital letters (and other keys), whatâs sent is shift plus the character (i.e. the equivalent of pressing both of those keys on the keyboard).
+</p>
+<p class='vspace'></p><p>A modifier key is a special key on a computer keyboard that modifies the normal action of another key when the two are pressed in combination.
+</p>
+<p class='vspace'></p><p>For more on ASCII values and the characters or functions they represent, see <a class='urllink' href='http://www.asciitable.com' rel='nofollow'>asciitable.com</a>
+</p>
+<p class='vspace'></p><p>For multiple key presses use <a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</p>
+<p class='vspace'></p><p>The Leonardo's definitions for modifier keys are listed below:
+</p>
+<table width='500'><tr><td valign='top'> <strong>Key</strong>
+</td><td valign='top'> <strong>Hexadecimal value</strong>
+</td><td valign='top'> <strong>Decimal value</strong>
+</td></tr><tr><td valign='top'> KEY_LEFT_CTRL
+</td><td valign='top'> 0x80
+</td><td valign='top'> 128
+</td></tr><tr><td valign='top'> KEY_LEFT_SHIFT
+</td><td valign='top'> 0x81
+</td><td valign='top'> 129
+</td></tr><tr><td valign='top'> KEY_LEFT_ALT
+</td><td valign='top'> 0x82
+</td><td valign='top'> 130
+</td></tr><tr><td valign='top'> KEY_LEFT_GUI
+</td><td valign='top'> 0x83
+</td><td valign='top'> 131
+</td></tr><tr><td valign='top'> KEY_RIGHT_CTRL
+</td><td valign='top'> 0x84
+</td><td valign='top'> 132
+</td></tr><tr><td valign='top'> KEY_RIGHT_SHIFT
+</td><td valign='top'> 0x85
+</td><td valign='top'> 133
+</td></tr><tr><td valign='top'> KEY_RIGHT_ALT
+</td><td valign='top'> 0x86
+</td><td valign='top'> 134
+</td></tr><tr><td valign='top'> KEY_RIGHT_GUI
+</td><td valign='top'> 0x87
+</td><td valign='top'> 135
+</td></tr><tr><td valign='top'> KEY_UP_ARROW
+</td><td valign='top'> 0xDA
+</td><td valign='top'> 218
+</td></tr><tr><td valign='top'> KEY_DOWN_ARROW
+</td><td valign='top'> 0xD9
+</td><td valign='top'> 217
+</td></tr><tr><td valign='top'> KEY_LEFT_ARROW
+</td><td valign='top'> 0xD8
+</td><td valign='top'> 216
+</td></tr><tr><td valign='top'> KEY_RIGHT_ARROW
+</td><td valign='top'> 0xD7
+</td><td valign='top'> 215
+</td></tr><tr><td valign='top'> KEY_BACKSPACE
+</td><td valign='top'> 0xB2
+</td><td valign='top'> 178
+</td></tr><tr><td valign='top'> KEY_TAB
+</td><td valign='top'> 0xB3
+</td><td valign='top'> 179
+</td></tr><tr><td valign='top'> KEY_RETURN
+</td><td valign='top'> 0xB0
+</td><td valign='top'> 176
+</td></tr><tr><td valign='top'> KEY_ESC
+</td><td valign='top'> 0xB1
+</td><td valign='top'> 177
+</td></tr><tr><td valign='top'> KEY_INSERT
+</td><td valign='top'> 0xD1
+</td><td valign='top'> 209
+</td></tr><tr><td valign='top'> KEY_DELETE
+</td><td valign='top'> 0xD4
+</td><td valign='top'> 212
+</td></tr><tr><td valign='top'> KEY_PAGE_UP
+</td><td valign='top'> 0xD3
+</td><td valign='top'> 211
+</td></tr><tr><td valign='top'> KEY_PAGE_DOWN
+</td><td valign='top'> 0xD6
+</td><td valign='top'> 214
+</td></tr><tr><td valign='top'> KEY_HOME
+</td><td valign='top'> 0xD2
+</td><td valign='top'> 210
+</td></tr><tr><td valign='top'> KEY_END
+</td><td valign='top'> 0xD5
+</td><td valign='top'> 213
+</td></tr><tr><td valign='top'> KEY_CAPS_LOCK
+</td><td valign='top'> 0xC1
+</td><td valign='top'> 193
+</td></tr><tr><td valign='top'> KEY_F1
+</td><td valign='top'> 0xC2
+</td><td valign='top'> 194
+</td></tr><tr><td valign='top'> KEY_F2
+</td><td valign='top'> 0xC3
+</td><td valign='top'> 195
+</td></tr><tr><td valign='top'> KEY_F3
+</td><td valign='top'> 0xC4
+</td><td valign='top'> 196
+</td></tr><tr><td valign='top'> KEY_F4
+</td><td valign='top'> 0xC5
+</td><td valign='top'> 197
+</td></tr><tr><td valign='top'> KEY_F5
+</td><td valign='top'> 0xC6
+</td><td valign='top'> 198
+</td></tr><tr><td valign='top'> KEY_F6
+</td><td valign='top'> 0xC7
+</td><td valign='top'> 199
+</td></tr><tr><td valign='top'> KEY_F7
+</td><td valign='top'> 0xC8
+</td><td valign='top'> 200
+</td></tr><tr><td valign='top'> KEY_F8
+</td><td valign='top'> 0xC9
+</td><td valign='top'> 201
+</td></tr><tr><td valign='top'> KEY_F9
+</td><td valign='top'> 0xCA
+</td><td valign='top'> 202
+</td></tr><tr><td valign='top'> KEY_F10
+</td><td valign='top'> 0xCB
+</td><td valign='top'> 203
+</td></tr><tr><td valign='top'> KEY_F11
+</td><td valign='top'> 0xCC
+</td><td valign='top'> 204
+</td></tr><tr><td valign='top'> KEY_F12
+</td><td valign='top'> 0xCD
+</td><td valign='top'> 205
+</td></tr></table>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li></ul><p><br /><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/KeyboardPress.html b/reference/KeyboardPress.html
new file mode 100644
index 0000000..27eb663
--- /dev/null
+++ b/reference/KeyboardPress.html
@@ -0,0 +1,204 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardPress </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Keyboard</a>
+</p>
+<p class='vspace'></p><h2>Keyboard.press()</h2>
+<h4>Description</h4>
+<p>When called, Keyboard.press() functions as if a key were pressed and held on your keyboard. Useful when using <a class='wikilink' href='KeyboardModifiers.html'>modifier keys</a>. To end the key press, use <a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>() or <a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>().
+</p>
+<p class='vspace'></p><p>It is necessary to call <a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>() before using press().
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Keyboard.press()<br />
+</p><h4>Parameters</h4>
+<p>char : the key to press
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>None
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><br />
+<span class="co1">// use this option for OSX:</span><br />
+<span class="kw1">char</span> ctrlKey <span class="sy0">=</span> KEY_LEFT_GUI<span class="sy0">;</span><br />
+<span class="co1">// use this option for Windows and Linux:</span><br />
+<span class="co1">// char ctrlKey = KEY_LEFT_CTRL; </span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// make pin 2 an input and turn on the </span><br />
+ <span class="co1">// pullup resistor so it goes high unless</span><br />
+ <span class="co1">// connected to ground:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> INPUT_PULLUP<span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// initialize control over the keyboard:</span><br />
+ Keyboard.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">while</span> <span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// do nothing until pin 2 goes low</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">500</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// new document:</span><br />
+ Keyboard.<span class="me1">press</span><span class="br0">(</span>ctrlKey<span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="me1">press</span><span class="br0">(</span><span class="st0">'n'</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">100</span><span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="me1">releaseAll</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// wait for new window to open:</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPrint.html'>Keyboard.print</a>()
+</li><li><a class='wikilink' href='KeyboardPrintln.html'>Keyboard.println</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li><li><a class='wikilink' href='KeyboardWrite.html'>Keyboard.write</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/KeyboardPrint.html b/reference/KeyboardPrint.html
new file mode 100644
index 0000000..36635cc
--- /dev/null
+++ b/reference/KeyboardPrint.html
@@ -0,0 +1,193 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardPrint </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Keyboard</a>
+</p>
+<p class='vspace'></p><h2>Keyboard.print()</h2>
+<h4>Description</h4>
+<p>Sends a keystroke to a connected computer.
+</p>
+<p class='vspace'></p><p>Keyboard.print() must be called after initiating <a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>().
+</p>
+<p class='vspace'></p><p>WARNING: When you use the Keyboard.print() command, the Arduino takes over your keyboard! Make sure you have control before you use the command. A pushbutton to toggle the keyboard control state is effective.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Keyboard.print(character)<br />Keyboard.print(characters)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>character : a char or int to be sent to the computer as a keystroke
+characters : a string to be sent to the computer as a keystroke
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>int : number of bytes sent
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// make pin 2 an input and turn on the </span><br />
+ <span class="co1">// pullup resistor so it goes high unless</span><br />
+ <span class="co1">// connected to ground:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> INPUT_PULLUP<span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">//if the button is pressed</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span><span class="sy0">==</span><span class="kw2">LOW</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//Send the message</span><br />
+ Keyboard.<span class="kw1">print</span><span class="br0">(</span><span class="st0">"Hello!"</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardPrintln.html'>Keyboard.println</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li><li><a class='wikilink' href='KeyboardWrite.html'>Keyboard.write</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/KeyboardPrintln.html b/reference/KeyboardPrintln.html
new file mode 100644
index 0000000..de2c70d
--- /dev/null
+++ b/reference/KeyboardPrintln.html
@@ -0,0 +1,192 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardPrintln </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Keyboard</a>
+</p>
+<p class='vspace'></p><h2>Keyboard.println()</h2>
+<h4>Description</h4>
+<p>Sends a keystroke to a connected computer, followed by a newline and carriage return.
+</p>
+<p class='vspace'></p><p>Keyboard.println() must be called after initiating <a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>().
+</p>
+<p class='vspace'></p><p>WARNING: When you use the Keyboard.println() command, the Arduino takes over your keyboard! Make sure you have control before you use the command. A pushbutton to toggle the keyboard control state is effective.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Keyboard.println()<br />Keyboard.println(character)<br />Keyboard.println(characters)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>character : a char or int to be sent to the computer as a keystroke, followed by newline and carriage return.<br />characters : a string to be sent to the computer as a keystroke, followed by a newline and carriage return.
+<br />
+</p><h4>Returns</h4>
+<p>int : number of bytes sent
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// make pin 2 an input and turn on the </span><br />
+ <span class="co1">// pullup resistor so it goes high unless</span><br />
+ <span class="co1">// connected to ground:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> INPUT_PULLUP<span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">//if the button is pressed</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span><span class="sy0">==</span><span class="kw2">LOW</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//Send the message</span><br />
+ Keyboard.<span class="kw1">println</span><span class="br0">(</span><span class="st0">"Hello!"</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardPrint.html'>Keyboard.print</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li><li><a class='wikilink' href='KeyboardWrite.html'>Keyboard.write</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/KeyboardRelease.html b/reference/KeyboardRelease.html
new file mode 100644
index 0000000..b66bd91
--- /dev/null
+++ b/reference/KeyboardRelease.html
@@ -0,0 +1,204 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardRelease </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Keyboard</a>
+</p>
+<p class='vspace'></p><h2>Keyboard.release()</h2>
+<h4>Description</h4>
+<p>Lets go of the specified key. See <a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>() for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Keyboard.release(key)<br />
+</p><h4>Parameters</h4>
+<p>key : the key to release. <em>char</em>
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>int : the number of keys released
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><br />
+<span class="co1">// use this option for OSX:</span><br />
+<span class="kw1">char</span> ctrlKey <span class="sy0">=</span> KEY_LEFT_GUI<span class="sy0">;</span><br />
+<span class="co1">// use this option for Windows and Linux:</span><br />
+<span class="co1">// char ctrlKey = KEY_LEFT_CTRL; </span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// make pin 2 an input and turn on the </span><br />
+ <span class="co1">// pullup resistor so it goes high unless</span><br />
+ <span class="co1">// connected to ground:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> INPUT_PULLUP<span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// initialize control over the keyboard:</span><br />
+ Keyboard.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">while</span> <span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// do nothing until pin 2 goes low</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">500</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// new document:</span><br />
+ Keyboard.<span class="me1">press</span><span class="br0">(</span>ctrlKey<span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="me1">press</span><span class="br0">(</span><span class="st0">'n'</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">100</span><span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="me1">release</span><span class="br0">(</span>ctrlKey<span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="me1">release</span><span class="br0">(</span><span class="st0">'n'</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// wait for new window to open:</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardPrint.html'>Keyboard.print</a>()
+</li><li><a class='wikilink' href='KeyboardPrintln.html'>Keyboard.println</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li><li><a class='wikilink' href='KeyboardWrite.html'>Keyboard.write</a>()
+</li><li><a class='wikilink' href='KeyboardModifiers.html'>Keyboard Modifiers</a>
+</li></ul><p><br /><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/KeyboardReleaseAll.html b/reference/KeyboardReleaseAll.html
new file mode 100644
index 0000000..5c04f40
--- /dev/null
+++ b/reference/KeyboardReleaseAll.html
@@ -0,0 +1,203 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardReleaseAll </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Keyboard</a>
+</p>
+<p class='vspace'></p><h2>Keyboard.releaseAll()</h2>
+<h4>Description</h4>
+<p>Lets go of all keys currently pressed. See <a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>() for additional information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Keyboard.releaseAll()<br />
+</p><h4>Parameters</h4>
+<p>None
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>int : the number of keys released
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><br />
+<span class="co1">// use this option for OSX:</span><br />
+<span class="kw1">char</span> ctrlKey <span class="sy0">=</span> KEY_LEFT_GUI<span class="sy0">;</span><br />
+<span class="co1">// use this option for Windows and Linux:</span><br />
+<span class="co1">// char ctrlKey = KEY_LEFT_CTRL; </span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// make pin 2 an input and turn on the </span><br />
+ <span class="co1">// pullup resistor so it goes high unless</span><br />
+ <span class="co1">// connected to ground:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> INPUT_PULLUP<span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// initialize control over the keyboard:</span><br />
+ Keyboard.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">while</span> <span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// do nothing until pin 2 goes low</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">500</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// new document:</span><br />
+ Keyboard.<span class="me1">press</span><span class="br0">(</span>ctrlKey<span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="me1">press</span><span class="br0">(</span><span class="st0">'n'</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">100</span><span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="me1">releaseAll</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// wait for new window to open:</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardPrint.html'>Keyboard.print</a>()
+</li><li><a class='wikilink' href='KeyboardPrintln.html'>Keyboard.println</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardWrite.html'>Keyboard.write</a>()
+</li><li><a class='wikilink' href='KeyboardModifiers.html'>Keyboard Modifiers</a>
+</li></ul><p><br /><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/KeyboardWrite.html b/reference/KeyboardWrite.html
new file mode 100644
index 0000000..895d860
--- /dev/null
+++ b/reference/KeyboardWrite.html
@@ -0,0 +1,205 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - KeyboardWrite </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Keyboard</a>
+</p>
+<p class='vspace'></p><h2>Keyboard.write()</h2>
+<h4>Description</h4>
+<p>Sends a keystroke to a connected computer. This is similar to pressing and releasing a key on your keyboard. You can send some ASCII characters or the additional <a class='wikilink' href='KeyboardModifiers.html'>keyboard modifiers and special keys</a>.
+</p>
+<p class='vspace'></p><p>Only ASCII characters that are on the keyboard are supported. For example, ASCII 8 (backspace) would work, but ASCII 25 (Substitution) would not. When sending capital letters, Keyboard.write() sends a shift command plus the desired character, just as if typing on a keyboard. If sending a numeric type, it sends it as an ASCII character (ex. Keyboard.write(97) will send 'a').
+</p>
+<p class='vspace'></p><p>For a complete list of ASCII characters, see <a class='urllink' href='http://www.asciitable.com/' rel='nofollow'>ASCIITable.com</a>.
+</p>
+<p class='vspace'></p><p>WARNING: When you use the Keyboard.write() command, the Arduino takes over your keyboard! Make sure you have control before you use the command. A pushbutton to toggle the keyboard control state is effective.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Keyboard.write(character)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>character : a char or int to be sent to the computer. Can be sent in any notation that's acceptable for a char. For example, all of the below are acceptable and send the same value, 65 or ASCII A:
+</p>
+<p class='vspace'></p><p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino">Keyboard.<span class="kw1">write</span><span class="br0">(</span><span class="nu0">65</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// sends ASCII value 65, or A </span><br />
+Keyboard.<span class="kw1">write</span><span class="br0">(</span><span class="st0">'A'</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// same thing as a quoted character</span><br />
+Keyboard.<span class="kw1">write</span><span class="br0">(</span><span class="nu12">0x41</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// same thing in hexadecimal</span><br />
+Keyboard.<span class="kw1">write</span><span class="br0">(</span><span class="nu6">0b01000001</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// same thing in binary (weird choice, but it works)</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>int : number of bytes sent
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock2'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// make pin 2 an input and turn on the </span><br />
+ <span class="co1">// pullup resistor so it goes high unless</span><br />
+ <span class="co1">// connected to ground:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> INPUT_PULLUP<span class="br0">)</span><span class="sy0">;</span><br />
+ Keyboard.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">//if the button is pressed</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span><span class="sy0">==</span><span class="kw2">LOW</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//Send an ASCII 'A', </span><br />
+ Keyboard.<span class="kw1">write</span><span class="br0">(</span><span class="nu0">65</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardPrint.html'>Keyboard.print</a>()
+</li><li><a class='wikilink' href='KeyboardPrintln.html'>Keyboard.println</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/ASCIITable'>ASCIITable</a> tutorial
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Libraries.html b/reference/Libraries.html
index ad463eb..fbbdd0a 100644
--- a/reference/Libraries.html
+++ b/reference/Libraries.html
@@ -82,7 +82,10 @@ a.varlink { text-decoration:none; }
</li><li><a class='wikilink' href='Wire.html'>Wire</a> - Two Wire Interface (<span class='wikiword'>TWI/I2C</span>) for sending and receiving data over a net of devices or sensors.
</li></ul><p class='vspace'></p><p>The Matrix and Sprite libraries are no longer part of the core distribution.
</p>
-<p class='vspace'></p><h3>Contributed Libraries</h3>
+<p class='vspace'></p><h3>Leonardo Only Libraries</h3>
+<ul><li><a class='wikilink' href='MouseKeyboard.html'>Keyboard</a> - Send keystrokes to an attached computer.
+</li><li><a class='wikilink' href='MouseKeyboard.html'>Mouse</a> - Control cursor movement on a connected computer.
+</li></ul><p class='vspace'></p><h3>Contributed Libraries</h3>
<p>If you're using one of these libraries, you need to install it first. To do so, download the library and unzip it. It should be in a folder of its own, and will typically contain at least two files, one with a .h suffix and one with a .cpp suffix. Open your Arduino sketchbook folder. If there is already a folder there called <strong>libraries</strong>, place the library folder in there. If not, create a folder called <strong>libraries</strong> in the sketchbook folder, and drop the library folder in there. Then re-start the Arduino programming environment, and you should see your new library in the <strong>Sketch > Import Library</strong> menu.
</p>
<p class='vspace'></p><p>For details, see the page on <a class='wikilink' href='Guide_Environment#libraries.html'>the Arduino environment</a>.
@@ -122,8 +125,7 @@ a.varlink { text-decoration:none; }
</p><ul><li><a class='urllink' href='http://sundial.org/arduino/index.php/pstring/' rel='nofollow'>PString</a> - a lightweight class for printing to buffers
</li><li><a class='urllink' href='http://arduiniana.org/libraries/streaming/' rel='nofollow'>Streaming</a> - a method to simplify print statements
</li></ul><p class='vspace'></p><p>For a guide to writing your own libraries, see <a class='wikilink' href='http://arduino.cc/en/Hacking/LibraryTutorial'>this tutorial</a>.
-</p>
-<p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+<a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/LiquidCrystalBegin.html b/reference/LiquidCrystalBegin.html
index 8b14ec3..889e671 100644
--- a/reference/LiquidCrystalBegin.html
+++ b/reference/LiquidCrystalBegin.html
@@ -80,7 +80,8 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><p>cols: the number of columns that the display has
</p>
-<p class='vspace'></p><p>rows: the number of rows that the display has
+<p class='vspace'></p><p>rows: the number of rows that the display has
+<br clear='all' /><br clear='all' />
<a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
diff --git a/reference/LiquidCrystalSetCursor.html b/reference/LiquidCrystalSetCursor.html
index 3c96607..f103b75 100644
--- a/reference/LiquidCrystalSetCursor.html
+++ b/reference/LiquidCrystalSetCursor.html
@@ -81,6 +81,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>col: the column at which to position the cursor (with 0 being the first column)
</p>
<p class='vspace'></p><p>row: the row at which to position the cursor (with 0 being the first row)
+<br clear='all' /><br clear='all' />
<a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
diff --git a/reference/MouseBegin.html b/reference/MouseBegin.html
new file mode 100644
index 0000000..3052060
--- /dev/null
+++ b/reference/MouseBegin.html
@@ -0,0 +1,184 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - MouseBegin </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>MouseKeyboard</a>
+</p>
+<p class='vspace'></p><h2>Mouse.begin()</h2>
+<h4>Description</h4>
+<p>Begins emulating the mouse connected to a computer. begin() must be called before controlling the computer. To end control, use <a class='wikilink' href='MouseEnd.html'>Mouse.end</a>().
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Mouse.begin()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>nothing
+</p>
+<p class='vspace'></p><h3>Example:</h3>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> <span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+<br />
+ <span class="co1">//initiate the Mouse library when button is pressed</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span> <br />
+<br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='MouseClick.html'>Mouse.click</a>()
+</li><li><a class='wikilink' href='MouseEnd.html'>Mouse.end</a>()
+</li><li><a class='wikilink' href='MouseMove.html'>Mouse.move</a>()
+</li><li><a class='wikilink' href='MousePress.html'>Mouse.press</a>()
+</li><li><a class='wikilink' href='MouseRelease.html'>Mouse.release</a>()
+</li><li><a class='wikilink' href='MouseIsPressed.html'>Mouse.isPressed</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/MouseClick.html b/reference/MouseClick.html
new file mode 100644
index 0000000..54161c5
--- /dev/null
+++ b/reference/MouseClick.html
@@ -0,0 +1,191 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - MouseClick </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Mouse</a>
+</p>
+<p class='vspace'></p><h2>Mouse.click()</h2>
+<h4>Description</h4>
+<p>Sends a momentary click to the computer at the location of the cursor. This is the same as pressing and immediately releasing the mouse button.
+</p>
+<p class='vspace'></p><p>Mouse.click() defaults to the left mouse button.
+</p>
+<p class='vspace'></p><p>WARNING: When you use the Mouse.click() command, the Arduino takes over your mouse! Make sure you have control before you use the command. A pushbutton to toggle the mouse control state is effective.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Mouse.click();<br />Mouse.click(button);
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>button: which mouse button to press - <em>char</em>
+</p><ul><li>MOUSE_LEFT (default)
+</li><li>MOUSE_RIGHT
+</li><li>MOUSE_MIDDLE
+</li></ul><p class='vspace'></p><h4>Returns</h4>
+<p>nothing
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span><span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//initiate the Mouse library</span><br />
+ Mouse.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//if the button is pressed, send a Right mouse click</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="me1">click</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span> <br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>()
+</li><li><a class='wikilink' href='MouseEnd.html'>Mouse.end</a>()
+</li><li><a class='wikilink' href='MouseMove.html'>Mouse.move</a>()
+</li><li><a class='wikilink' href='MousePress.html'>Mouse.press</a>()
+</li><li><a class='wikilink' href='MouseRelease.html'>Mouse.release</a>()
+</li><li><a class='wikilink' href='MouseIsPressed.html'>Mouse.isPressed</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/MouseEnd.html b/reference/MouseEnd.html
new file mode 100644
index 0000000..6ed15ae
--- /dev/null
+++ b/reference/MouseEnd.html
@@ -0,0 +1,187 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - MouseEnd </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>MouseKeyboard</a>
+</p>
+<p class='vspace'></p><h2>Mouse.end()</h2>
+<h4>Description</h4>
+<p>Stops emulating the mouse connected to a computer. To start control, use <a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>().
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Mouse.end()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>nothing
+</p>
+<p class='vspace'></p><h3>Example:</h3>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span><span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//initiate the Mouse library</span><br />
+ Mouse.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//if the button is pressed, send a Right mouse click</span><br />
+ <span class="co1">//then end the Mouse emulation </span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="me1">click</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ Mouse.<span class="kw1">end</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span> <br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>()
+</li><li><a class='wikilink' href='MouseClick.html'>Mouse.click</a>()
+</li><li><a class='wikilink' href='MouseMove.html'>Mouse.move</a>()
+</li><li><a class='wikilink' href='MousePress.html'>Mouse.press</a>()
+</li><li><a class='wikilink' href='MouseRelease.html'>Mouse.release</a>()
+</li><li><a class='wikilink' href='MouseIsPressed.html'>Mouse.isPressed</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/MouseIsPressed.html b/reference/MouseIsPressed.html
new file mode 100644
index 0000000..7c915b4
--- /dev/null
+++ b/reference/MouseIsPressed.html
@@ -0,0 +1,204 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - MouseIsPressed </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Mouse</a>
+</p>
+<p class='vspace'></p><h2>Mouse.isPressed()</h2>
+<h4>Description</h4>
+<p>Checks the current status of all mouse buttons, and reports if any are pressed or not.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Mouse.isPressed();<br />Mouse.isPressed(button);<br />
+</p><h4>Parameters</h4>
+<p>When there is no value passed, it checks the status of the left mouse button.
+</p>
+<p class='vspace'></p><p>button: which mouse button to check - <em>char</em>
+</p><ul><li>MOUSE_LEFT (default)
+</li><li>MOUSE_RIGHT
+</li><li>MOUSE_MIDDLE
+</li></ul><p class='vspace'></p><h4>Returns</h4>
+<p>boolean : reports wether a button is pressed or not
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//The switch that will initiate the Mouse press</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span><span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//The switch that will terminate the Mouse press</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">3</span><span class="sy0">,</span><span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//Start serial communication with the computer</span><br />
+ <span class="kw1">Serial1</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//initiate the Mouse library</span><br />
+ Mouse.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//a variable for checking the button's state</span><br />
+ <span class="kw1">int</span> mouseState<span class="sy0">=</span><span class="nu0">0</span><span class="sy0">;</span><br />
+ <span class="co1">//if the switch attached to pin 2 is closed, press and hold the right mouse button and save the state ina variable</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="me1">press</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ mouseState<span class="sy0">=</span>Mouse.<span class="me1">isPressed</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+ <span class="co1">//if the switch attached to pin 3 is closed, release the right mouse button and save the state in a variable</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">3</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="me1">release</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ mouseState<span class="sy0">=</span>Mouse.<span class="me1">isPressed</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+ <span class="co1">//print out the current mouse button state</span><br />
+ <span class="kw1">Serial1</span>.<span class="kw1">println</span><span class="br0">(</span>mouseState<span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">10</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>()
+</li><li><a class='wikilink' href='MouseClick.html'>Mouse.click</a>()
+</li><li><a class='wikilink' href='MouseEnd.html'>Mouse.end</a>()
+</li><li><a class='wikilink' href='MouseMove.html'>Mouse.move</a>()
+</li><li><a class='wikilink' href='MousePress.html'>Mouse.press</a>()
+</li><li><a class='wikilink' href='MouseRelease.html'>Mouse.release</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/MouseKeyboard.html b/reference/MouseKeyboard.html
new file mode 100644
index 0000000..52c6ef0
--- /dev/null
+++ b/reference/MouseKeyboard.html
@@ -0,0 +1,128 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - MouseKeyboard </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>Mouse and Keyboard libraries</h2>
+<p>These core libraries allow an Arduino Leonardo board to appear as a native Mouse and/or Keyboard to a connected computer.
+</p>
+<p class='vspace'></p><p><strong>A word of caution on using the Leonardo as a Mouse or Keyboard</strong>: if the Mouse or Keyboard library is constantly running, it will be difficult to program your board. Functions such as Mouse.move() and Keyboard.print() will move your cursor or send keystrokes to a connected computer and should only be called when you are ready to handle them. It is recommended to use a control system to turn this functionality on, like a physical switch or only responding to specific input you can control.
+</p>
+<p class='vspace'></p><p>When using the Mouse or Keyboard library, it may be best to test your output first using Serial.print(). This way, you can be sure you know what values are being reported. Refer to the Mouse and Keyboard examples for some ways to handle this.
+</p>
+<p class='vspace'></p><h4>Mouse</h4>
+<p>The mouse functions enable to Leonardo to control cursor movement on a connected computer. When updating the cursor position, it is always relative to the cursor's previous location.
+</p>
+<p class='vspace'></p><ul><li><a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>()
+</li><li><a class='wikilink' href='MouseClick.html'>Mouse.click</a>()
+</li><li><a class='wikilink' href='MouseEnd.html'>Mouse.end</a>()
+</li><li><a class='wikilink' href='MouseMove.html'>Mouse.move</a>()
+</li><li><a class='wikilink' href='MousePress.html'>Mouse.press</a>()
+</li><li><a class='wikilink' href='MouseRelease.html'>Mouse.release</a>()
+</li><li><a class='wikilink' href='MouseIsPressed.html'>Mouse.isPressed</a>()
+</li></ul><p class='vspace'></p><h4>Keyboard</h4>
+<p>The keyboard functions enable to Leonardo to send keystrokes to an attached computer.
+</p>
+<p class='vspace'></p><p><strong>Note: Not every possible ASCII character, particularly the non-printing ones, can be sent with the Keyboard library</strong>. The Leonardo supports the use of modifier keys. Modifier keys change the behavior of another key when pressed simultaneously. <a class='wikilink' href='KeyboardModifiers.html'>See here</a> for additional information on supported keys and their use.
+</p>
+<p class='vspace'></p><ul><li><a class='wikilink' href='KeyboardBegin.html'>Keyboard.begin</a>()
+</li><li><a class='wikilink' href='KeyboardEnd.html'>Keyboard.end</a>()
+</li><li><a class='wikilink' href='KeyboardPress.html'>Keyboard.press</a>()
+</li><li><a class='wikilink' href='KeyboardPrint.html'>Keyboard.print</a>()
+</li><li><a class='wikilink' href='KeyboardPrintln.html'>Keyboard.println</a>()
+</li><li><a class='wikilink' href='KeyboardRelease.html'>Keyboard.release</a>()
+</li><li><a class='wikilink' href='KeyboardReleaseAll.html'>Keyboard.releaseAll</a>()
+</li><li><a class='wikilink' href='KeyboardWrite.html'>Keyboard.write</a>()
+</li></ul><p class='vspace'></p><h4>Examples</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/KeybaordAndMouseControl'>KeybaordAndMouseControl</a>: Demonstrates the Mouse and Keyboard commands in one program.
+</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/KeyboardMessage'>KeyboardMessage</a>: Sends a text string when a button is pressed.
+</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/KeyboardLogout'>KeyboardLogout</a> : Logs out the current user with key commands
+</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/KeyboardSerial'>KeyboardSerial</a>: Reads a byte from the serial port, and sends back a keystroke.
+</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/KeyboardReprogram'>KeyboardReprogram</a> : opens a new window in the Arduino IDE and reprograms the Leonardo with a simple blink program
+</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/ButtonMouseControl'>ButtonMouseControl</a>: Control cursor movement with 5 pushbuttons.
+</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/JoystickMouseControl'>JoystickMouseControl</a>: Controls a computer's cursor movement with a Joystick when a button is pressed.
+</li></ul><p><br /><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/MouseMove.html b/reference/MouseMove.html
new file mode 100644
index 0000000..22cb01e
--- /dev/null
+++ b/reference/MouseMove.html
@@ -0,0 +1,242 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - MouseMove </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Mouse</a>
+</p>
+<p class='vspace'></p><h2>Mouse.move()</h2>
+<h4>Description</h4>
+<p>Moves the cursor on a connected computer. The motion onscreen is always relative to the cursor's current location. Before using Mouse.move() you must call <a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>()
+</p>
+<p class='vspace'></p><p>WARNING: When you use the Mouse.move() command, the Arduino takes over your mouse! Make sure you have control before you use the command. A pushbutton to toggle the mouse control state is effective.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Mouse.move(xVal, yPos, wheel);
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>xVal: amount to move along the x-axis - <em>int</em><br />yVal: amount to move along the y-axis - <em>int</em><br />wheel: amount to move scroll wheel - <em>int</em><br />
+</p><h4>Returns</h4>
+<p>nothing
+</p>
+<p class='vspace'></p><h3>Example:</h3>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino">const <span class="kw1">int</span> xAxis <span class="sy0">=</span> A1<span class="sy0">;</span> <span class="co1">//analog sensor for X axis </span><br />
+const <span class="kw1">int</span> yAxis <span class="sy0">=</span> A2<span class="sy0">;</span> <span class="co1">// analog sensor for Y axis</span><br />
+<br />
+<span class="kw1">int</span> range <span class="sy0">=</span> <span class="nu0">12</span><span class="sy0">;</span> <span class="co1">// output range of X or Y movement</span><br />
+<span class="kw1">int</span> responseDelay <span class="sy0">=</span> <span class="nu0">2</span><span class="sy0">;</span> <span class="co1">// response delay of the mouse, in ms</span><br />
+<span class="kw1">int</span> threshold <span class="sy0">=</span> range<span class="sy0">/</span><span class="nu0">4</span><span class="sy0">;</span> <span class="co1">// resting threshold</span><br />
+<span class="kw1">int</span> center <span class="sy0">=</span> range<span class="sy0">/</span><span class="nu0">2</span><span class="sy0">;</span> <span class="co1">// resting position value</span><br />
+<span class="kw1">int</span> minima<span class="br0">[</span><span class="br0">]</span> <span class="sy0">=</span> <span class="br0">{</span> <br />
+ <span class="nu0">1023</span><span class="sy0">,</span> <span class="nu0">1023</span><span class="br0">}</span><span class="sy0">;</span> <span class="co1">// actual analogRead minima for {x, y}</span><br />
+<span class="kw1">int</span> maxima<span class="br0">[</span><span class="br0">]</span> <span class="sy0">=</span> <span class="br0">{</span><br />
+ <span class="nu0">0</span><span class="sy0">,</span><span class="nu0">0</span><span class="br0">}</span><span class="sy0">;</span> <span class="co1">// actual analogRead maxima for {x, y}</span><br />
+<span class="kw1">int</span> axis<span class="br0">[</span><span class="br0">]</span> <span class="sy0">=</span> <span class="br0">{</span><br />
+ xAxis<span class="sy0">,</span> yAxis<span class="br0">}</span><span class="sy0">;</span> <span class="co1">// pin numbers for {x, y}</span><br />
+<span class="kw1">int</span> mouseReading<span class="br0">[</span><span class="nu0">2</span><span class="br0">]</span><span class="sy0">;</span> <span class="co1">// final mouse readings for {x, y}</span><br />
+<br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ Mouse.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+<br />
+<span class="co1">// read and scale the two axes:</span><br />
+ <span class="kw1">int</span> xReading <span class="sy0">=</span> readAxis<span class="br0">(</span><span class="nu0">0</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">int</span> yReading <span class="sy0">=</span> readAxis<span class="br0">(</span><span class="nu0">1</span><span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+<span class="co1">// move the mouse:</span><br />
+ Mouse.<span class="me1">move</span><span class="br0">(</span>xReading<span class="sy0">,</span> yReading<span class="sy0">,</span> <span class="nu0">0</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span>responseDelay<span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="coMULTI">/*<br />
+ reads an axis (0 or 1 for x or y) and scales the <br />
+ analog input range to a range from 0 to <range><br />
+*/</span><br />
+<br />
+<span class="kw1">int</span> readAxis<span class="br0">(</span><span class="kw1">int</span> axisNumber<span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">int</span> distance <span class="sy0">=</span> <span class="nu0">0</span><span class="sy0">;</span> <span class="co1">// distance from center of the output range</span><br />
+<br />
+ <span class="co1">// read the analog input:</span><br />
+ <span class="kw1">int</span> reading <span class="sy0">=</span> <span class="kw1">analogRead</span><span class="br0">(</span>axis<span class="br0">[</span>axisNumber<span class="br0">]</span><span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+<span class="co1">// of the current reading exceeds the max or min for this axis,</span><br />
+<span class="co1">// reset the max or min:</span><br />
+ <span class="kw1">if</span> <span class="br0">(</span>reading <span class="sy0"><</span> minima<span class="br0">[</span>axisNumber<span class="br0">]</span><span class="br0">)</span> <span class="br0">{</span><br />
+ minima<span class="br0">[</span>axisNumber<span class="br0">]</span> <span class="sy0">=</span> reading<span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+ <span class="kw1">if</span> <span class="br0">(</span>reading <span class="sy0">></span> maxima<span class="br0">[</span>axisNumber<span class="br0">]</span><span class="br0">)</span> <span class="br0">{</span><br />
+ maxima<span class="br0">[</span>axisNumber<span class="br0">]</span> <span class="sy0">=</span> reading<span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<br />
+ <span class="co1">// map the reading from the analog input range to the output range:</span><br />
+ reading <span class="sy0">=</span> <span class="kw1">map</span><span class="br0">(</span>reading<span class="sy0">,</span> minima<span class="br0">[</span>axisNumber<span class="br0">]</span><span class="sy0">,</span> maxima<span class="br0">[</span>axisNumber<span class="br0">]</span><span class="sy0">,</span> <span class="nu0">0</span><span class="sy0">,</span> range<span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+ <span class="co1">// if the output reading is outside from the</span><br />
+ <span class="co1">// rest position threshold, use it:</span><br />
+ <span class="kw1">if</span> <span class="br0">(</span><span class="kw1">abs</span><span class="br0">(</span>reading <span class="sy0">-</span> center<span class="br0">)</span> <span class="sy0">></span> threshold<span class="br0">)</span> <span class="br0">{</span><br />
+ distance <span class="sy0">=</span> <span class="br0">(</span>reading <span class="sy0">-</span> center<span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span> <br />
+<br />
+ <span class="co1">// the Y axis needs to be inverted in order to </span><br />
+ <span class="co1">// map the movemment correctly:</span><br />
+ <span class="kw1">if</span> <span class="br0">(</span>axisNumber <span class="sy0">==</span> <span class="nu0">1</span><span class="br0">)</span> <span class="br0">{</span><br />
+ distance <span class="sy0">=</span> <span class="sy0">-</span>distance<span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<br />
+ <span class="co1">// return the distance for this axis:</span><br />
+ <span class="kw1">return</span> distance<span class="sy0">;</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>()
+</li><li><a class='wikilink' href='MouseClick.html'>Mouse.click</a>()
+</li><li><a class='wikilink' href='MouseEnd.html'>Mouse.end</a>()
+</li><li><a class='wikilink' href='MousePress.html'>Mouse.press</a>()
+</li><li><a class='wikilink' href='MouseRelease.html'>Mouse.release</a>()
+</li><li><a class='wikilink' href='MouseIsPressed.html'>Mouse.isPressed</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/MousePress.html b/reference/MousePress.html
new file mode 100644
index 0000000..ddb4882
--- /dev/null
+++ b/reference/MousePress.html
@@ -0,0 +1,200 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - MousePress </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Mouse</a>
+</p>
+<p class='vspace'></p><h2>Mouse.press()</h2>
+<h4>Description</h4>
+<p>Sends a button press to a connected computer. A press is the equivalent of clicking and continuously holding the mouse button. A press is cancelled with <a class='wikilink' href='MouseRelease.html'>Mouse.release</a>().
+</p>
+<p class='vspace'></p><p>Before using Mouse.press(), you need to start communication with <a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>().
+</p>
+<p class='vspace'></p><p>Mouse.press() defaults to a left button press.
+</p>
+<p class='vspace'></p><p>WARNING: When you use the Mouse.press() command, the Arduino takes over your mouse! Make sure you have control before you use the command. A pushbutton to toggle the mouse control state is effective.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Mouse.press();<br />Mouse.press(button)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>button: which mouse button to press - <em>char</em>
+</p><ul><li>MOUSE_LEFT (default)
+</li><li>MOUSE_RIGHT
+</li><li>MOUSE_MIDDLE
+</li></ul><p class='vspace'></p><h4>Returns</h4>
+<p>nothing
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//The switch that will initiate the Mouse press</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span><span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//The switch that will terminate the Mouse press</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">3</span><span class="sy0">,</span><span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//initiate the Mouse library</span><br />
+ Mouse.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//if the switch attached to pin 2 is closed, press and hold the right mouse button</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="me1">press</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+ <span class="co1">//if the switch attached to pin 3 is closed, release the right mouse button</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">3</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="me1">release</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>()
+</li><li><a class='wikilink' href='MouseClick.html'>Mouse.click</a>()
+</li><li><a class='wikilink' href='MouseEnd.html'>Mouse.end</a>()
+</li><li><a class='wikilink' href='MouseMove.html'>Mouse.move</a>()
+</li><li><a class='wikilink' href='MouseRelease.html'>Mouse.release</a>()
+</li><li><a class='wikilink' href='MouseIsPressed.html'>Mouse.isPressed</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/MouseRelease.html b/reference/MouseRelease.html
new file mode 100644
index 0000000..1cf98ed
--- /dev/null
+++ b/reference/MouseRelease.html
@@ -0,0 +1,196 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - MouseRelease </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='MouseKeyboard.html'>Mouse</a>
+</p>
+<p class='vspace'></p><h2>Mouse.release()</h2>
+<h4>Description</h4>
+<p>Sends a message that a previously pressed button (invoked through <a class='wikilink' href='MousePress.html'>Mouse.press()</a>) is released. Mouse.release() defaults to the left button.
+</p>
+<p class='vspace'></p><p>WARNING: When you use the Mouse.release() command, the Arduino takes over your mouse! Make sure you have control before you use the command. A pushbutton to toggle the mouse control state is effective.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Mouse.release();<br />Mouse.release(button);
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>button: which mouse button to press - <em>char</em>
+</p><ul><li>MOUSE_LEFT (default)
+</li><li>MOUSE_RIGHT
+</li><li>MOUSE_MIDDLE
+</li></ul><p class='vspace'></p><h4>Returns</h4>
+<p>nothing
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//The switch that will initiate the Mouse press</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span><span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//The switch that will terminate the Mouse press</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span><span class="nu0">3</span><span class="sy0">,</span><span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">//initiate the Mouse library</span><br />
+ Mouse.<span class="kw1">begin</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="co1">//if the switch attached to pin 2 is closed, press and hold the right mouse button</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">2</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="me1">press</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+ <span class="co1">//if the switch attached to pin 3 is closed, release the right mouse button</span><br />
+ <span class="kw1">if</span><span class="br0">(</span><span class="kw1">digitalRead</span><span class="br0">(</span><span class="nu0">3</span><span class="br0">)</span> <span class="sy0">==</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="br0">{</span><br />
+ Mouse.<span class="me1">release</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='MouseBegin.html'>Mouse.begin</a>()
+</li><li><a class='wikilink' href='MouseClick.html'>Mouse.click</a>()
+</li><li><a class='wikilink' href='MouseEnd.html'>Mouse.end</a>()
+</li><li><a class='wikilink' href='MouseMove.html'>Mouse.move</a>()
+</li><li><a class='wikilink' href='MousePress.html'>Mouse.press</a>()
+</li><li><a class='wikilink' href='MouseIsPressed.html'>Mouse.isPressed</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/PinMode.html b/reference/PinMode.html
index 2815b80..f229dab 100644
--- a/reference/PinMode.html
+++ b/reference/PinMode.html
@@ -31,6 +31,59 @@ type='text/css' />
.lfloat { float:left; margin-right:0.5em; }
.rfloat { float:right; margin-left:0.5em; }
a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
--></style> <meta name='robots' content='index,follow' />
@@ -68,7 +121,9 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2>pinMode()</h2>
<h4>Description</h4>
-<p>Configures the specified pin to behave either as an input or an output. See the description of <a class='wikilink' href='http://arduino.cc/en/Tutorial/DigitalPins'>digital pins</a> for details.
+<p>Configures the specified pin to behave either as an input or an output. See the description of <a class='wikilink' href='http://arduino.cc/en/Tutorial/DigitalPins'>digital pins</a> for details on the functionality of the pins.
+</p>
+<p class='vspace'></p><p>As of Arduino 1.0.1, it is possible to enable the internal pullup resistors with the mode INPUT_PULLUP. Additionally, the INPUT mode explicitly disables the internal pullups.
</p>
<p class='vspace'></p><h4>Syntax</h4>
<p>pinMode(pin, mode)
@@ -76,30 +131,34 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><h4>Parameters</h4>
<p>pin: the number of the pin whose mode you wish to set
</p>
-<p class='vspace'></p><p>mode: either <a class='wikilink' href='Constants.html'>INPUT</a> or <a class='wikilink' href='Constants.html'>OUTPUT</a>
+<p class='vspace'></p><p>mode: <a class='wikilink' href='Constants.html'>INPUT</a>, <a class='wikilink' href='Constants.html'>OUTPUT</a>, or <a class='wikilink' href='Constants.html'>INPUT_PULLUP</a>. (see the <a class='wikilink' href='http://arduino.cc/en/Tutorial/DigitalPins'>digital pins</a> page for a more complete description of the functionality.)
</p>
<p class='vspace'></p><h4>Returns</h4>
<p>None
</p>
<p class='vspace'></p><h4>Example</h4>
-<pre>
-
-int ledPin = 13; // LED connected to digital pin 13
-
-void setup()
-{
- pinMode(ledPin, OUTPUT); // sets the digital pin as output
-}
-
-void loop()
-{
- digitalWrite(ledPin, HIGH); // sets the LED on
- delay(1000); // waits for a second
- digitalWrite(ledPin, LOW); // sets the LED off
- delay(1000); // waits for a second
-}
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><br />
+<br />
+<span class="kw1">int</span> ledPin <span class="sy0">=</span> <span class="nu0">13</span><span class="sy0">;</span> <span class="co1">// LED connected to digital pin 13</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
+<span class="br0">{</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span>ledPin<span class="sy0">,</span> <span class="kw2">OUTPUT</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// sets the digital pin as output</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><br />
+<span class="br0">{</span><br />
+ <span class="kw1">digitalWrite</span><span class="br0">(</span>ledPin<span class="sy0">,</span> <span class="kw2">HIGH</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// sets the LED on</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// waits for a second</span><br />
+ <span class="kw1">digitalWrite</span><span class="br0">(</span>ledPin<span class="sy0">,</span> <span class="kw2">LOW</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// sets the LED off</span><br />
+ <span class="kw1">delay</span><span class="br0">(</span><span class="nu0">1000</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// waits for a second</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
-</pre>
+</p>
<p class='vspace'></p><h4>Note</h4>
<p>The analog input pins can be used as digital pins, referred to as A0, A1, etc.
</p>
@@ -108,7 +167,7 @@ void loop()
</li><li><a class='wikilink' href='DigitalWrite.html'>digitalWrite</a>()
</li><li><a class='wikilink' href='DigitalRead.html'>digitalRead</a>()
</li><li>Tutorial: <a class='wikilink' href='http://arduino.cc/en/Tutorial/DigitalPins'>Description of the pins on an Arduino board</a>
-</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/SPI.html b/reference/SPI.html
index 8440c6d..80823dc 100644
--- a/reference/SPI.html
+++ b/reference/SPI.html
@@ -97,9 +97,9 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>For more on SPI, see <a class='urllink' href='http://en.wikipedia.org/wiki/Serial_Peripheral_Interface_Bus#Mode_Numbers' rel='nofollow'>Wikipedia's page on SPI</a>.
</p>
<p class='vspace'></p><h3>Connections </h3>
-<p>On the Arduino Duemilanove and other <span class='wikiword'>ATmega168</span> / 328-based boards, the SPI bus uses pins 10 (SS), 11 (MOSI), 12 (MISO), and 13 (SCK). On the Arduino Mega, this is 50 (MISO), 51 (MOSI), 52 (SCK), and 53 (SS). Note that even if you're not using the SS pin, it must remain set as an output; otherwise, the SPI interface can be put into slave mode, rendering the library inoperative.
+<p>On the Arduino Duemilanove and other <span class='wikiword'>ATmega168</span> / 328-based boards, the SPI bus uses pins 10 (SS), 11 (MOSI), 12 (MISO), and 13 (SCK). On the Arduino Mega, this is 50 (MISO), 51 (MOSI), 52 (SCK), and 53 (SS). MISO, MOSI, and SCK are also available in a consistent physical location on the ICSP header; this is useful, for example, in designing a shield that works on the Uno and the Mega.
</p>
-<p class='vspace'></p><p>It is possible to use a pin other than pin 10 as the slave select (SS) pin. For example, the Arduino Ethernet shield uses pin 4 to control the SPI connection to the on-board SD card, and pin 10 to control the connection to the Ethernet controller.
+<p class='vspace'></p><p>Note that even if you're not using the SS pin, it must remain set as an output; otherwise, the SPI interface can be put into slave mode, rendering the library inoperative. It is, however, possible to use a pin other than pin 10 as the slave select (SS) pin. For example, the Arduino Ethernet shield uses pin 4 to control the SPI connection to the on-board SD card, and pin 10 to control the connection to the Ethernet controller.
</p>
<p class='vspace'></p></td><td width='10%' valign='top'>
<p class='vspace'></p></td><td width='35%' valign='top'>
diff --git a/reference/Serial.html b/reference/Serial.html
index a8d29a2..1931dc6 100644
--- a/reference/Serial.html
+++ b/reference/Serial.html
@@ -72,22 +72,34 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><p>You can use the Arduino environment's built-in serial monitor to communicate with an Arduino board. Click the serial monitor button in the toolbar and select the same baud rate used in the call to begin().
</p>
-<p class='vspace'></p><p>The Arduino Mega has three additional serial ports: <strong>Serial1</strong> on pins 19 (RX) and 18 (TX), <strong>Serial2</strong> on pins 17 (RX) and 16 (TX), <strong>Serial3</strong> on pins 15 (RX) and 14 (TX). To use these pins to communicate with your personal computer, you will need an additional USB-to-serial adaptor, as they are not connected to the Mega's USB-to-serial adaptor. To use them to communicate with an external TTL serial device, connect the TX pin to your device's RX pin, the RX to your device's TX pin, and the ground of your Mega to your device's ground. (Don't connect these pins directly to an <span class='wikiword'>RS232</span> serial port; they operate at +/- 12V and can damage your Arduino board.)
+<p class='vspace'></p><p>The <a class='wikilink' href='http://arduino.cc/en/Main/ArduinoBoardMega2560'>Arduino Mega</a> has three additional serial ports: <strong>Serial1</strong> on pins 19 (RX) and 18 (TX), <strong>Serial2</strong> on pins 17 (RX) and 16 (TX), <strong>Serial3</strong> on pins 15 (RX) and 14 (TX). To use these pins to communicate with your personal computer, you will need an additional USB-to-serial adaptor, as they are not connected to the Mega's USB-to-serial adaptor. To use them to communicate with an external TTL serial device, connect the TX pin to your device's RX pin, the RX to your device's TX pin, and the ground of your Mega to your device's ground. (Don't connect these pins directly to an <span class='wikiword'>RS232</span> serial port; they operate at +/- 12V and can damage your Arduino board.)
+</p>
+<p class='vspace'></p><p>The Arduino Leonardo board uses <strong>Serial1</strong> to communicate via <span class='wikiword'>RS232</span> on pins 0 (RX) and 1 (TX). <strong>Serial</strong> is reserved for USB CDC communication. For more information, refer to the Leonardo <a class='wikilink' href='Guide_ArduinoLeonardo.html'>getting started</a> page and <a class='wikilink' href='http://arduino.cc/en/Main/ArduinoBoardLeonardo'>hardware page</a>.
</p>
<p class='vspace'></p></td><td width='10%' valign='top'>
<p class='vspace'></p></td><td width='35%' valign='top'>
<p class='vspace'></p><h4>Functions</h4>
-<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+<ul><li><a class='wikilink' href='Serial_IfSerial.html'>if (Serial)</a>
+<p class='vspace'></p></li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
-</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
-</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
-</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_Find.html'>find</a>()
+</li><li><a class='wikilink' href='Serial_FindUntil.html'>findUntil</a>()
</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_ParseFloat.html'>parseFloat</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_ReadBytes.html'>readBytes</a>()
+</li><li><a class='wikilink' href='Serial_ReadBytesUntil.html'>readBytesUntil</a>()
+</li><li><a class='wikilink' href='Serial_SetTimeout.html'>setTimeout</a>()
</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+<p class='vspace'></p></li><li><a class='wikilink' href='SerialEvent.html'>serialEvent</a>()
</li></ul><p class='vspace'></p><h4>Examples</h4>
-<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/ASCIITable'>ASCII Table</a>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/ReadASCIIString'>ReadASCIIString</a>
+</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/ASCIITable'>ASCII Table</a>
</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/Dimmer'>Dimmer</a>
</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/Graph'>Graph</a>
</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/PhysicalPixel'>Physical Pixel</a>
@@ -95,7 +107,7 @@ a.varlink { text-decoration:none; }
</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/SerialCallResponse'>Serial Call Response</a>
</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/SerialCallResponseASCII'>Serial Call Response ASCII</a>
</li></ul><p class='vspace'></p></td></tr></table>
-<p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+<p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/Serial_Available.html b/reference/Serial_Available.html
index 9768bad..b327d9d 100644
--- a/reference/Serial_Available.html
+++ b/reference/Serial_Available.html
@@ -121,7 +121,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2>available()</h2>
<h4>Description</h4>
-<p>Get the number of bytes (characters) available for reading from the serial port. This is data that's already arrived and stored in the serial receive buffer (which holds 128 bytes). available() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
+<p>Get the number of bytes (characters) available for reading from the serial port. This is data that's already arrived and stored in the serial receive buffer (which holds 64 bytes). available() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
</p>
<p class='vspace'></p><h4>Syntax</h4>
<p>Serial.available()
@@ -154,13 +154,16 @@ a.varlink { text-decoration:none; }
<span class="kw1">Serial</span>.<span class="kw1">print</span><span class="br0">(</span><span class="st0">"I received: "</span><span class="br0">)</span><span class="sy0">;</span><br />
<span class="kw1">Serial</span>.<span class="kw1">println</span><span class="br0">(</span>incomingByte<span class="sy0">,</span> <span class="kw2">DEC</span><span class="br0">)</span><span class="sy0">;</span><br />
<span class="br0">}</span><br />
-<span class="br0">}</span><br />
-@<span class="br0">]</span><br />
-<br />
-<span class="st0">''</span><span class="st0">'Arduino Mega example:'</span><span class="st0">''</span><br />
-<br />
-<span class="br0">[</span>@<br />
-<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='Serial_Available?action=sourceblock&num=1.html' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><p><strong>Arduino Mega example:</strong>
+</p>
+<p class='vspace'></p><p>
+<div class='sourceblock ' id='sourceblock2'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
<span class="kw1">Serial</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
<span class="kw1">Serial1</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
<br />
@@ -179,13 +182,22 @@ a.varlink { text-decoration:none; }
<span class="kw1">Serial</span>.<span class="kw1">print</span><span class="br0">(</span>inByte<span class="sy0">,</span> <span class="kw2">BYTE</span><span class="br0">)</span><span class="sy0">;</span> <br />
<span class="br0">}</span><br />
<span class="br0">}</span></div></div>
- <div class='sourceblocklink'><a href='Serial_Available?action=sourceblock&num=1.html' type='text/plain'>[Get Code]</a></div>
+ <div class='sourceblocklink'><a href='Serial_Available?action=sourceblock&num=2.html' type='text/plain'>[Get Code]</a></div>
</div>
</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_Read.html'>Serial.read</a>()
-</li><li><a class='wikilink' href='Serial_Flush.html'>Serial.flush</a>()
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='selflink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
</li><li><a class='wikilink' href='StreamAvailable.html'>Stream.available</a>()
</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
diff --git a/reference/Serial_Begin.html b/reference/Serial_Begin.html
index 577e5f8..f57d640 100644
--- a/reference/Serial_Begin.html
+++ b/reference/Serial_Begin.html
@@ -31,6 +31,59 @@ type='text/css' />
.lfloat { float:left; margin-right:0.5em; }
.rfloat { float:right; margin-left:0.5em; }
a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
--></style> <meta name='robots' content='index,follow' />
@@ -82,40 +135,56 @@ a.varlink { text-decoration:none; }
<p>nothing
</p>
<p class='vspace'></p><h3>Example:</h3>
-<pre>
-void setup() {
- Serial.begin(9600); // opens serial port, sets data rate to 9600 bps
-}
-
-void loop() {}
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// opens serial port, sets data rate to 9600 bps</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='Serial_Begin?action=sourceblock&num=1.html' type='text/plain'>[Get Code]</a></div>
+</div>
-</pre>
+</p>
<p class='vspace'></p><p><strong>Arduino Mega example:</strong>
</p>
-<p class='vspace'></p><pre>
-// Arduino Mega using all four of its Serial ports
-// (Serial, Serial1, Serial2, Serial3),
-// with different baud rates:
-
-void setup(){
- Serial.begin(9600);
- Serial1.begin(38400);
- Serial2.begin(19200);
- Serial3.begin(4800);
-
- Serial.println("Hello Computer");
- Serial1.println("Hello Serial 1");
- Serial2.println("Hello Serial 2");
- Serial3.println("Hello Serial 3");
-}
-
-void loop() {}
+<p class='vspace'></p><p>
+<div class='sourceblock ' id='sourceblock2'>
+ <div class='sourceblocktext'><div class="arduino"><span class="co1">// Arduino Mega using all four of its Serial ports </span><br />
+<span class="co1">// (Serial, Serial1, Serial2, Serial3), </span><br />
+<span class="co1">// with different baud rates:</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><span class="br0">{</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial1</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">38400</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial2</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">19200</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial3</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">4800</span><span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+ <span class="kw1">Serial</span>.<span class="kw1">println</span><span class="br0">(</span><span class="st0">"Hello Computer"</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial1</span>.<span class="kw1">println</span><span class="br0">(</span><span class="st0">"Hello Serial 1"</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial2</span>.<span class="kw1">println</span><span class="br0">(</span><span class="st0">"Hello Serial 2"</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial3</span>.<span class="kw1">println</span><span class="br0">(</span><span class="st0">"Hello Serial 3"</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='Serial_Begin?action=sourceblock&num=2.html' type='text/plain'>[Get Code]</a></div>
+</div>
-</pre>
+</p>
<p class='vspace'></p><p><em>Thanks to Jeff Gray for the mega example</em>
</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_End.html'>Serial.end</a>()
+<ul><li><a class='selflink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
</div>
diff --git a/reference/Serial_End.html b/reference/Serial_End.html
index 22ba03d..763cd88 100644
--- a/reference/Serial_End.html
+++ b/reference/Serial_End.html
@@ -82,7 +82,17 @@ a.varlink { text-decoration:none; }
<p>nothing
</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_Begin.html'>Serial.begin</a>()
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='selflink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
</div>
diff --git a/reference/Serial_Find.html b/reference/Serial_Find.html
new file mode 100644
index 0000000..a81ff13
--- /dev/null
+++ b/reference/Serial_Find.html
@@ -0,0 +1,98 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - Find </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<h2>Serial.find()</h2>
+<h4>Description</h4>
+<p>Serial.find() reads data from the serial buffer until the target string of given length is found. The function returns true if target string is found, false if it times out.
+</p>
+<p class='vspace'></p><p>Serial.flush() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Serial.find(<em>target</em>)<br />
+</p><h4>Parameters</h4>
+<p><em>target</em> : the string to search for (char)<br />
+</p><h4>Returns</h4>
+<p>boolean<br />
+</p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li><li><a class='wikilink' href='StreamFind.html'>Stream.find</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Serial_Find?action=edit.html'>Edit Page</a> | <a href='Serial_Find?action=diff.html'>Page History</a> | <a href='Serial_Find?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Serial_FindUntil.html b/reference/Serial_FindUntil.html
new file mode 100644
index 0000000..4668520
--- /dev/null
+++ b/reference/Serial_FindUntil.html
@@ -0,0 +1,102 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - FindUntil </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<h2>Serial.findUntil()</h2>
+<h4>Description</h4>
+<p>Serial.findUntil() reads data from the serial buffer until a target string of given length or terminator string is found.
+</p>
+<p class='vspace'></p><p>The function returns true if the target string is found, false if it times out.
+</p>
+<p class='vspace'></p><p>Serial.findUntil() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Serial.findUntil(<em>target</em>, <em>terminal</em>)<br />
+</p><h4>Parameters</h4>
+<p><em>target</em> : the string to search for (char)<br /><em>terminal</em> : the terminal string in the search (char)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>boolean<br />
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li><li><a class='wikilink' href='StreamFindUntil.html'>Stream.findUntil</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Serial_FindUntil?action=edit.html'>Edit Page</a> | <a href='Serial_FindUntil?action=diff.html'>Page History</a> | <a href='Serial_FindUntil?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Serial_Flush.html b/reference/Serial_Flush.html
index 856610b..2e8b61a 100644
--- a/reference/Serial_Flush.html
+++ b/reference/Serial_Flush.html
@@ -68,9 +68,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2>flush()</h2>
<h4>Description</h4>
-<p>Flushes the buffer of incoming serial data. Any call to Serial.read() or Serial.available() will return only data received after all the most recent call to Serial.flush().
-</p>
-<p class='vspace'></p><p>Serial.flush() waits for outgoing data to transmit before clearing the buffer contents.
+<p>Waits for the transmission of outgoing serial data to complete. (Prior to Arduino 1.0, this instead removed any buffered incoming serial data.)
</p>
<p class='vspace'></p><p>flush() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
</p>
@@ -86,8 +84,17 @@ a.varlink { text-decoration:none; }
<p>nothing
</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_Read.html'>Serial.read</a>()
-</li><li><a class='wikilink' href='Serial_Available.html'>Serial.available</a>()
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='selflink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
</li><li><a class='wikilink' href='StreamFlush.html'>Stream.flush()</a>
</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
diff --git a/reference/Serial_IfSerial.html b/reference/Serial_IfSerial.html
new file mode 100644
index 0000000..c4a9467
--- /dev/null
+++ b/reference/Serial_IfSerial.html
@@ -0,0 +1,191 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - IfSerial </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><a class='wikilink' href='Serial.html'>Serial</a>
+</p>
+<p class='vspace'></p><h2>if (Serial)</h2>
+<h4>Description</h4>
+<p>Indicates if the specified Serial port is ready.
+</p>
+<p class='vspace'></p><p>On the Leonardo, <strong>if (Serial)</strong> indicates wether or not the USB CDC serial connection is open. For all other instances, including <strong>if (Serial1)</strong> on the Leonardo, this will always returns true.
+</p>
+<p class='vspace'></p><p>This was introduced in Arduino 1.0.1.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>All boards:</em><br />if (Serial)
+</p>
+<p class='vspace'></p><p><em>Arduino Leonardo specific:</em> <br />if (Serial1) <br />
+<em>Arduino Mega specific:</em> <br />if (Serial1) <br />if (Serial2) <br />if (Serial3)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>boolean : returns true if the specified serial port is available. This will only return false if querying the Leonardo's USB CDC serial connection before it is ready.
+</p>
+<p class='vspace'></p><h3>Example:</h3>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span> <br />
+ <span class="co1">//Initialize serial and wait for port to open:</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span> <br />
+ <span class="kw1">while</span> <span class="br0">(</span><span class="sy0">!</span><span class="kw1">Serial</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="sy0">;</span> <span class="co1">// wait for serial port to connect. Needed for Leonardo only</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span> <br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span> <br />
+ <span class="co1">//proceed normally</span><br />
+<span class="br0">}</span> <br />
+<br />
+ </div></div>
+ <div class='sourceblocklink'><a href='Serial_IfSerial?action=sourceblock&num=1.html' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Serial_IfSerial?action=edit.html'>Edit Page</a> | <a href='Serial_IfSerial?action=diff.html'>Page History</a> | <a href='Serial_IfSerial?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Serial_ParseFloat.html b/reference/Serial_ParseFloat.html
new file mode 100644
index 0000000..1bb96d8
--- /dev/null
+++ b/reference/Serial_ParseFloat.html
@@ -0,0 +1,101 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - ParseFloat </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<h2>Serial.parseFloat()</h2>
+<h4>Description</h4>
+<p>Serial.parseFloat() returns the first valid floating point number from the Serial buffer. Characters that are not digits (or the minus sign) are skipped.
+parseFloat() is terminated by the first character that is not a floating point number.
+</p>
+<p class='vspace'></p><p>Serial.parseFloat() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Serial.parseFloat()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>float
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li><li><a class='wikilink' href='StreamParseFloat.html'>Stream.parseFloat</a>()
+</li></ul>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Serial_ParseFloat?action=edit.html'>Edit Page</a> | <a href='Serial_ParseFloat?action=diff.html'>Page History</a> | <a href='Serial_ParseFloat?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Serial_ParseInt.html b/reference/Serial_ParseInt.html
new file mode 100644
index 0000000..d564070
--- /dev/null
+++ b/reference/Serial_ParseInt.html
@@ -0,0 +1,174 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - ParseInt </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><a class='wikilink' href='Serial.html'>Serial</a>
+</p>
+<p class='vspace'></p><h2>parseInt()</h2>
+<h4>Description</h4>
+<p>Looks for the next valid integer in the incoming serial stream. parseInt() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Serial.parseInt()
+</p>
+<p class='vspace'></p><p><em>Arduino Mega only:</em> <br />Serial1.parseInt() <br />Serial2.parseInt() <br />Serial3.parseInt()
+</p>
+<p class='vspace'></p><h3>Parameters</h3>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>int : the next valid integer
+</p>
+<p class='vspace'></p><h3>Example</h3>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"> </div></div>
+ <div class='sourceblocklink'><a href='Serial_ParseInt?action=sourceblock&num=1.html' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='selflink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
+</li><li><a class='wikilink' href='StreamParseInt.html'>Stream.parseInt</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Serial_ParseInt?action=edit.html'>Edit Page</a> | <a href='Serial_ParseInt?action=diff.html'>Page History</a> | <a href='Serial_ParseInt?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Serial_Peek.html b/reference/Serial_Peek.html
index 07cda55..0d8a265 100644
--- a/reference/Serial_Peek.html
+++ b/reference/Serial_Peek.html
@@ -82,9 +82,17 @@ a.varlink { text-decoration:none; }
<p>the first byte of incoming serial data available (or -1 if no data is available) - <em>int</em>
</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_Available.html'>Serial.available</a>()
-</li><li><a class='wikilink' href='Serial_Flush.html'>Serial.flush</a>()
-</li><li><a class='wikilink' href='Serial_Read.html'>Serial.read</a>()
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='selflink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
</li><li><a class='wikilink' href='StreamPeek.html'>Stream.peek</a>()
</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
diff --git a/reference/Serial_Print.html b/reference/Serial_Print.html
index 0d464a8..d3263a8 100644
--- a/reference/Serial_Print.html
+++ b/reference/Serial_Print.html
@@ -147,7 +147,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>format: specifies the number base (for integral data types) or number of decimal places (for floating point types)
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>byte<br />print() will return the number of bytes written, though reading that number is optional
+<p>size_t (long): print() returns the number of bytes written, though reading that number is optional
</p>
<p class='vspace'></p><h4>Example:</h4>
<p>
@@ -207,8 +207,17 @@ Uses a FOR loop for data and prints a number in various formats.<br />
<p>As of version 1.0, serial transmission is asynchronous; Serial.print() will return before any characters are transmitted.
</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_Write.html'>Serial.write</a>()
-</li><li><a class='wikilink' href='Serial_Println.html'>Serial.println</a>()
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='selflink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
</li><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/Memory'>Memory</a>
</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
diff --git a/reference/Serial_Println.html b/reference/Serial_Println.html
index 70a446c..6426096 100644
--- a/reference/Serial_Println.html
+++ b/reference/Serial_Println.html
@@ -132,7 +132,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>format: specifies the number base (for integral data types) or number of decimal places (for floating point types)
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>byte<br />println() will return the number of bytes written, though reading that number is optional
+<p>size_t (long): println() returns the number of bytes written, though reading that number is optional
</p>
<p class='vspace'></p><h4>Example:</h4>
<p>
@@ -173,9 +173,18 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_Print.html'>Serial.print</a>()
-</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
-</p>
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='selflink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
+</li></ul><p class='vspace'></p>
</div>
diff --git a/reference/Serial_Read.html b/reference/Serial_Read.html
index 2826289..4e8ab24 100644
--- a/reference/Serial_Read.html
+++ b/reference/Serial_Read.html
@@ -31,6 +31,59 @@ type='text/css' />
.lfloat { float:left; margin-right:0.5em; }
.rfloat { float:right; margin-left:0.5em; }
a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
--></style> <meta name='robots' content='index,follow' />
@@ -82,32 +135,43 @@ a.varlink { text-decoration:none; }
<p>the first byte of incoming serial data available (or -1 if no data is available) - <em>int</em>
</p>
<p class='vspace'></p><h3>Example</h3>
-<pre>
-int incomingByte = 0; // for incoming serial data
-
-void setup() {
- Serial.begin(9600); // opens serial port, sets data rate to 9600 bps
-}
-
-void loop() {
-
- // send data only when you receive data:
- if (Serial.available() > 0) {
- // read the incoming byte:
- incomingByte = Serial.read();
-
- // say what you got:
- Serial.print("I received: ");
- Serial.println(incomingByte, DEC);
- }
-}
-
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="kw1">int</span> incomingByte <span class="sy0">=</span> <span class="nu0">0</span><span class="sy0">;</span> <span class="co1">// for incoming serial data</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// opens serial port, sets data rate to 9600 bps</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+<br />
+ <span class="co1">// send data only when you receive data:</span><br />
+ <span class="kw1">if</span> <span class="br0">(</span><span class="kw1">Serial</span>.<span class="kw1">available</span><span class="br0">(</span><span class="br0">)</span> <span class="sy0">></span> <span class="nu0">0</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// read the incoming byte:</span><br />
+ incomingByte <span class="sy0">=</span> <span class="kw1">Serial</span>.<span class="kw1">read</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+ <span class="co1">// say what you got:</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">print</span><span class="br0">(</span><span class="st0">"I received: "</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">Serial</span>.<span class="kw1">println</span><span class="br0">(</span>incomingByte<span class="sy0">,</span> <span class="kw2">DEC</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span><br />
+ </div></div>
+ <div class='sourceblocklink'><a href='Serial_Read?action=sourceblock&num=1.html' type='text/plain'>[Get Code]</a></div>
+</div>
-</pre>
+</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_Available.html'>Serial.available</a>()
-</li><li><a class='wikilink' href='Serial_Flush.html'>Serial.flush</a>()
-</li><li><a class='wikilink' href='Serial_Peek.html'>Serial.peek</a>()
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='selflink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
+</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
+</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='wikilink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
</li><li><a class='wikilink' href='StreamRead.html'>Stream.read</a>()
</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
diff --git a/reference/Serial_ReadBytes.html b/reference/Serial_ReadBytes.html
new file mode 100644
index 0000000..8a3b486
--- /dev/null
+++ b/reference/Serial_ReadBytes.html
@@ -0,0 +1,103 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - ReadBytes </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<h2>Serial.readBytes()</h2>
+<h4>Description</h4>
+<p>Serial.readBytes() reads characters from the serial port into a buffer. The function terminates if the determined length has been read, or it times out (see <a class='wikilink' href='Serial_SetTimeout.html'>Serial.setTimeout</a>()).
+</p>
+<p class='vspace'></p><p>Serial.readBytes() returns the number of characters placed in the buffer. A 0 means no valid data was found.
+</p>
+<p class='vspace'></p><p>Serial.readBytes() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Serial.readBytes(buffer, length)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>buffer: the buffer to store the bytes in (char[] or byte[])<br />length : the number of bytes to read (int)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>byte
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li><li><a class='wikilink' href='StreamReadBytes.html'>Stream.readBytes</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Serial_ReadBytes?action=edit.html'>Edit Page</a> | <a href='Serial_ReadBytes?action=diff.html'>Page History</a> | <a href='Serial_ReadBytes?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Serial_ReadBytesUntil.html b/reference/Serial_ReadBytesUntil.html
new file mode 100644
index 0000000..1ee33fe
--- /dev/null
+++ b/reference/Serial_ReadBytesUntil.html
@@ -0,0 +1,104 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - ReadBytesUntil </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<h2>Serial.readBytesUntil()</h2>
+<h4>Description</h4>
+<p>Serial.readBytesUntil() reads characters from the serial buffer into an array. The function terminates if the terminator character is detected, the determined length has been read, or it times out (see <a class='wikilink' href='Serial_SetTimeout.html'>Serial.setTimeout</a>()).
+</p>
+<p class='vspace'></p><p>Serial.readBytesUntil() returns the number of characters read into the buffer. A 0 means no valid data was found.
+</p>
+<p class='vspace'></p><p>Serial.readBytesUntil() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Serial.readBytesUntil(<em>character</em>, <em>buffer</em>, <em>length</em>)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p><em>character</em> : the character to search for (char)<br /><em>buffer</em>: the buffer to store the bytes in (char[] or byte[])
+<em>length</em> : the number of bytes to read (int)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>byte
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li><li><a class='wikilink' href='StreamReadBytesUntil.html'>Stream.readBytesUntil</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Serial_ReadBytesUntil?action=edit.html'>Edit Page</a> | <a href='Serial_ReadBytesUntil?action=diff.html'>Page History</a> | <a href='Serial_ReadBytesUntil?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Serial_SetTimeout.html b/reference/Serial_SetTimeout.html
new file mode 100644
index 0000000..e030cce
--- /dev/null
+++ b/reference/Serial_SetTimeout.html
@@ -0,0 +1,100 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - SetTimeout </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<h2>Serial.setTimeout()</h2>
+<h4>Description</h4>
+<p>Serial.setTimeout() sets the maximum milliseconds to wait for serial data when using <a class='wikilink' href='Serial_ReadBytesUntil.html'>Serial.readBytesUntil</a>() or <a class='wikilink' href='Serial_ReadBytes.html'>Serial.readBytes</a>(). It defaults to 1000 milliseconds.
+</p>
+<p class='vspace'></p><p>Serial.setTimeout() inherits from the <a class='wikilink' href='Stream.html'>Stream</a> utility class.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Serial.setTimeout(<em>time</em>)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p><em>time</em> : timeout duration in milliseconds (long).
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>None
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li><li><a class='wikilink' href='StreamSetTimeout.html'>Stream.setTimeout</a>()
+</li></ul>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='Serial_SetTimeout?action=edit.html'>Edit Page</a> | <a href='Serial_SetTimeout?action=diff.html'>Page History</a> | <a href='Serial_SetTimeout?action=print.html' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Serial_Write.html b/reference/Serial_Write.html
index 11de21d..70e1656 100644
--- a/reference/Serial_Write.html
+++ b/reference/Serial_Write.html
@@ -157,9 +157,17 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h4>See also</h4>
-<ul><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+<ul><li><a class='wikilink' href='Serial_Begin.html'>begin</a>()
+</li><li><a class='wikilink' href='Serial_End.html'>end</a>()
+</li><li><a class='wikilink' href='Serial_Available.html'>available</a>()
+</li><li><a class='wikilink' href='Serial_Read.html'>read</a>()
+</li><li><a class='wikilink' href='Serial_Peek.html'>peek</a>()
+</li><li><a class='wikilink' href='Serial_ParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='Serial_Flush.html'>flush</a>()
</li><li><a class='wikilink' href='Serial_Print.html'>print</a>()
</li><li><a class='wikilink' href='Serial_Println.html'>println</a>()
+</li><li><a class='selflink' href='Serial_Write.html'>write</a>()
+</li><li><a class='wikilink' href='SerialEvent.html'>SerialEvent</a>()<br />
</li></ul>
</div>
diff --git a/reference/ServerPrint.html b/reference/ServerPrint.html
index 08d2dd1..69cb880 100644
--- a/reference/ServerPrint.html
+++ b/reference/ServerPrint.html
@@ -81,8 +81,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>BASE (optional): the base in which to print numbers: BIN for binary (base 2), DEC for decimal (base 10), OCT for octal (base 8), HEX for hexadecimal (base 16).
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>byte<br />print() will return the number of bytes written, though reading that number is optional
-<a class='wikilink' href='index.html'>Reference Home</a>
+<p>byte<br />print() will return the number of bytes written, though reading that number is optional<br /><br /><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/ServerPrintln.html b/reference/ServerPrintln.html
index a933fd3..8ec5e13 100644
--- a/reference/ServerPrintln.html
+++ b/reference/ServerPrintln.html
@@ -81,8 +81,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>BASE (optional): the base in which to print numbers: BIN for binary (base 2), DEC for decimal (base 10), OCT for octal (base 8), HEX for hexadecimal (base 16).
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>byte<br />println() will return the number of bytes written, though reading that number is optional
-<a class='wikilink' href='index.html'>Reference Home</a>
+<p>byte<br />println() will return the number of bytes written, though reading that number is optional<br /><br /><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/ShiftIn.html b/reference/ShiftIn.html
index 08ae449..80cf152 100644
--- a/reference/ShiftIn.html
+++ b/reference/ShiftIn.html
@@ -73,14 +73,16 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>Note: this is a software implementation; Arduino also provides an <a class='wikilink' href='SPI.html'>SPI library</a> that uses the hardware implementation, which is faster but only works on specific pins.
</p>
<p class='vspace'></p><h4>Syntax</h4>
-<p>shiftIn(dataPin, clockPin, bitOrder)
-</p>
+<pre>
+byte incoming = shiftIn(dataPin, clockPin, bitOrder)
+
+</pre>
<p class='vspace'></p><h4>Parameters</h4>
-<p>dataPin: the pin on which to output each bit (<em>int</em>)
+<p>dataPin: the pin on which to input each bit (<em>int</em>)
</p>
-<p class='vspace'></p><p>clockPin: the pin to toggle once the <strong>dataPin</strong> has been set to the correct value (<em>int</em>)
+<p class='vspace'></p><p>clockPin: the pin to toggle to signal a read from <strong>dataPin</strong>
</p>
-<p class='vspace'></p><p>bitOrder: which order to shift out the bits; either <strong>MSBFIRST</strong> or <strong>LSBFIRST</strong>.<br />(Most Significant Bit First, or, Least Significant Bit First)
+<p class='vspace'></p><p>bitOrder: which order to shift in the bits; either <strong>MSBFIRST</strong> or <strong>LSBFIRST</strong>.<br />(Most Significant Bit First, or, Least Significant Bit First)
</p>
<p class='vspace'></p><h4>Returns</h4>
<p>the value read (<em>byte</em>)
diff --git a/reference/Sizeof.html b/reference/Sizeof.html
index 739e9fa..78f1809 100644
--- a/reference/Sizeof.html
+++ b/reference/Sizeof.html
@@ -93,20 +93,21 @@ void loop() {
for (i = 0; i < sizeof(myStr) - 1; i++){
Serial.print(i, DEC);
Serial.print(" = ");
- Serial.println(myStr[i], BYTE);
+ Serial.write(myStr[i]);
+ Serial.println();
}
+ delay(5000); // slow down the program
}
-
</pre><p>Note that sizeof returns the total number of bytes. So for larger variable types such as ints, the for loop would look something like this.
+Note also that a properly formatted string ends with the NULL symbol, which has ASCII value 0.
</p>
<p class='vspace'></p><pre>
for (i = 0; i < (sizeof(myInts)/sizeof(int)) - 1; i++) {
// do something with myInts[i]
}
-</pre>
-<p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</pre><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/SoftwareSerial.html b/reference/SoftwareSerial.html
index 3ea7703..1a45b73 100644
--- a/reference/SoftwareSerial.html
+++ b/reference/SoftwareSerial.html
@@ -131,17 +131,51 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><ul><li>If using multiple software serial ports, only one can receive data at a time.
</li><li>Not all pins on the Mega and Mega 2560 support change interrupts, so only the following can be used for RX: 10, 11, 12, 13, 50, 51, 52, 53, 62, 63, 64, 65, 66, 67, 68, 69
+</li><li>Not all pins on the Leonardo support change interrupts, so only the following can be used for RX: 8, 9, 10, 11, 14 (MISO), 15 (SCK), 16 (MOSI).
</li></ul><p class='vspace'></p><h4>Example</h4>
<div class='code' >
<p class='vspace'></p><p>
<div class='sourceblock ' id='sourceblock1'>
- <div class='sourceblocktext'><div class="arduino"><span class="co2">#include <SoftwareSerial.h></span><br />
+ <div class='sourceblocktext'><div class="arduino"><span class="coMULTI">/*<br />
+ Software serial multple serial test<br />
+ <br />
+ Receives from the hardware serial, sends to software serial.<br />
+ Receives from software serial, sends to hardware serial.<br />
+ <br />
+ The circuit: <br />
+ * RX is digital pin 10 (connect to TX of other device)<br />
+ * TX is digital pin 11 (connect to RX of other device)<br />
+ <br />
+ Note:<br />
+ Not all pins on the Mega and Mega 2560 support change interrupts, <br />
+ so only the following can be used for RX: <br />
+ 10, 11, 12, 13, 50, 51, 52, 53, 62, 63, 64, 65, 66, 67, 68, 69<br />
+ <br />
+ Not all pins on the Leonardo support change interrupts, <br />
+ so only the following can be used for RX: <br />
+ 8, 9, 10, 11, 14 (MISO), 15 (SCK), 16 (MOSI).<br />
+ <br />
+ created back in the mists of time<br />
+ modified 25 May 2012<br />
+ by Tom Igoe<br />
+ based on Mikal Hart's example<br />
+ <br />
+ This example code is in the public domain.<br />
+ <br />
+ */</span><br />
+<span class="co2">#include <SoftwareSerial.h></span><br />
<br />
-SoftwareSerial mySerial<span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> <span class="nu0">3</span><span class="br0">)</span><span class="sy0">;</span><br />
+SoftwareSerial mySerial<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span> <span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span> <span class="co1">// RX, TX</span><br />
<br />
<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <br />
<span class="br0">{</span><br />
+ <span class="co1">// Open serial communications and wait for port to open:</span><br />
<span class="kw1">Serial</span>.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">57600</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">while</span> <span class="br0">(</span><span class="sy0">!</span><span class="kw1">Serial</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="sy0">;</span> <span class="co1">// wait for serial port to connect. Needed for Leonardo only</span><br />
+ <span class="br0">}</span><br />
+<br />
+<br />
<span class="kw1">Serial</span>.<span class="kw1">println</span><span class="br0">(</span><span class="st0">"Goodnight moon!"</span><span class="br0">)</span><span class="sy0">;</span><br />
<br />
<span class="co1">// set the data rate for the SoftwareSerial port</span><br />
@@ -167,6 +201,7 @@ SoftwareSerial mySerial<span class="br0">(</span><span class="nu0">2</span><
</li><li><a class='wikilink' href='SoftwareSerialBegin.html'>begin</a>()
</li><li><a class='wikilink' href='SoftwareSerialIsListening.html'>isListening</a>()
</li><li><a class='wikilink' href='SoftwareSerialOverflow.html'>overflow</a>()
+</li><li><a class='wikilink' href='SoftwareSerialPeek.html'>peek</a>()
</li><li><a class='wikilink' href='SoftwareSerialRead.html'>read</a>()
</li><li><a class='wikilink' href='SoftwareSerialPrint.html'>print</a>()
</li><li><a class='wikilink' href='SoftwareSerialPrintln.html'>println</a>()
diff --git a/reference/SoftwareSerialAvailable.html b/reference/SoftwareSerialAvailable.html
index 30d671b..11c91fe 100644
--- a/reference/SoftwareSerialAvailable.html
+++ b/reference/SoftwareSerialAvailable.html
@@ -31,6 +31,59 @@ type='text/css' />
.lfloat { float:left; margin-right:0.5em; }
.rfloat { float:right; margin-left:0.5em; }
a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
--></style> <meta name='robots' content='index,follow' />
@@ -80,30 +133,34 @@ a.varlink { text-decoration:none; }
<p>the number of bytes available to read
</p>
<p class='vspace'></p><h4>Example</h4>
-<pre>// include the SoftwareSerial library so you can use its functions:
-#include <SoftwareSerial.h>
-
-#define rxPin 2
-#define txPin 3
-
-// set up a new serial port
-SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin);
-
-void setup() {
- // define pin modes for tx, rx:
- pinMode(rxPin, INPUT);
- pinMode(txPin, OUTPUT);
- // set the data rate for the SoftwareSerial port
- mySerial.begin(9600);
-}
-
-void loop() {
- if (mySerial.available()>0){
- mySerial.read();
- }
-}
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="co1">// include the SoftwareSerial library so you can use its functions:</span><br />
+<span class="co2">#include <SoftwareSerial.h></span><br />
+<br />
+<span class="co2">#define rxPin 10</span><br />
+<span class="co2">#define txPin 11</span><br />
+<br />
+<span class="co1">// set up a new serial port</span><br />
+SoftwareSerial mySerial <span class="sy0">=</span> SoftwareSerial<span class="br0">(</span>rxPin<span class="sy0">,</span> txPin<span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// define pin modes for tx, rx:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span>rxPin<span class="sy0">,</span> <span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span>txPin<span class="sy0">,</span> <span class="kw2">OUTPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// set the data rate for the SoftwareSerial port</span><br />
+ mySerial.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="kw1">if</span> <span class="br0">(</span>mySerial.<span class="kw1">available</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">></span><span class="nu0">0</span><span class="br0">)</span><span class="br0">{</span><br />
+ mySerial.<span class="kw1">read</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="br0">}</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
-</pre>
+</p>
<p class='vspace'></p><h4>See also</h4>
<ul><li><a class='wikilink' href='SoftwareSerialConstructor.html'>SoftwareSerial</a>()
</li><li><a class='wikilink' href='SoftwareSerialRead.html'>read</a>()
diff --git a/reference/SoftwareSerialBegin.html b/reference/SoftwareSerialBegin.html
index 8a81f0c..fa45cc4 100644
--- a/reference/SoftwareSerialBegin.html
+++ b/reference/SoftwareSerialBegin.html
@@ -31,6 +31,59 @@ type='text/css' />
.lfloat { float:left; margin-right:0.5em; }
.rfloat { float:right; margin-left:0.5em; }
a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
--></style> <meta name='robots' content='index,follow' />
@@ -68,7 +121,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2><span class='wikiword'>SoftwareSerial</span>: begin(speed)</h2>
<h4>Description</h4>
-<p>Sets the speed (baud rate) for the serial communication. Using speeds higher than 9600 baud will result in faulty communication.
+<p>Sets the speed (baud rate) for the serial communication. Supported baud rates are 300, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 31250, 38400, 57600, and 115200.
</p>
<p class='vspace'></p><h4>Parameters</h4>
<p>speed: the baud rate (<em>long</em>)
@@ -77,28 +130,32 @@ a.varlink { text-decoration:none; }
<p>none
</p>
<p class='vspace'></p><h4>Example</h4>
-<pre>// include the SoftwareSerial library so you can use its functions:
-#include <SoftwareSerial.h>
-
-#define rxPin 2
-#define txPin 3
-
-// set up a new serial port
-SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin);
-
-void setup() {
- // define pin modes for tx, rx:
- pinMode(rxPin, INPUT);
- pinMode(txPin, OUTPUT);
- // set the data rate for the SoftwareSerial port
- mySerial.begin(9600);
-}
-
-void loop() {
- // ...
-}
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino"><span class="co1">// include the SoftwareSerial library so you can use its functions:</span><br />
+<span class="co2">#include <SoftwareSerial.h></span><br />
+<br />
+<span class="co2">#define rxPin 10</span><br />
+<span class="co2">#define txPin 11</span><br />
+<br />
+<span class="co1">// set up a new serial port</span><br />
+SoftwareSerial mySerial <span class="sy0">=</span> SoftwareSerial<span class="br0">(</span>rxPin<span class="sy0">,</span> txPin<span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// define pin modes for tx, rx:</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span>rxPin<span class="sy0">,</span> <span class="kw2">INPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="kw1">pinMode</span><span class="br0">(</span>txPin<span class="sy0">,</span> <span class="kw2">OUTPUT</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <span class="co1">// set the data rate for the SoftwareSerial port</span><br />
+ mySerial.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span> <span class="br0">{</span><br />
+ <span class="co1">// ...</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
-</pre>
+</p>
<p class='vspace'></p><h4>See also</h4>
<ul><li><a class='wikilink' href='SoftwareSerialConstructor.html'>SoftwareSerial</a>()
</li><li><a class='wikilink' href='SoftwareSerialRead.html'>read</a>()
diff --git a/reference/SoftwareSerialIsListening.html b/reference/SoftwareSerialIsListening.html
index d162367..b34b3f3 100644
--- a/reference/SoftwareSerialIsListening.html
+++ b/reference/SoftwareSerialIsListening.html
@@ -137,8 +137,8 @@ a.varlink { text-decoration:none; }
<div class='sourceblock ' id='sourceblock1'>
<div class='sourceblocktext'><div class="arduino"><span class="co2">#include <SoftwareSerial.h></span><br />
<br />
-<span class="co1">// software serial : TX = digital pin 2, RX = digital pin 3</span><br />
-SoftwareSerial portOne<span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> <span class="nu0">3</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="co1">// software serial : TX = digital pin 10, RX = digital pin 11</span><br />
+SoftwareSerial portOne<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span><span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span><br />
<br />
<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
<span class="br0">{</span><br />
diff --git a/reference/SoftwareSerialListen.html b/reference/SoftwareSerialListen.html
index d8dc11c..917be89 100644
--- a/reference/SoftwareSerialListen.html
+++ b/reference/SoftwareSerialListen.html
@@ -121,7 +121,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2><span class='wikiword'>SoftwareSerial</span>: listen()</h2>
<h4>Description</h4>
-<p>Enables the selected software serial port to listen. Only one software port can listen at a time.
+<p>Enables the selected software serial port to listen. Only one software serial port can listen at a time; data that arrives for other ports will be discarded. Any data already received is discarded during the call to listen() (unless the given instance is already listening).
</p>
<p class='vspace'></p><h4>Syntax</h4>
<p><em>mySerial</em>.listen()
@@ -137,11 +137,11 @@ a.varlink { text-decoration:none; }
<div class='sourceblock ' id='sourceblock1'>
<div class='sourceblocktext'><div class="arduino"><span class="co2">#include <SoftwareSerial.h></span><br />
<br />
-<span class="co1">// software serial : TX = digital pin 2, RX = digital pin 3</span><br />
-SoftwareSerial portOne<span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> <span class="nu0">3</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="co1">// software serial : TX = digital pin 10, RX = digital pin 11</span><br />
+SoftwareSerial portOne<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span> <span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span><br />
<br />
-<span class="co1">// software serial : TX = digital pin 4, RX = digital pin 5</span><br />
-SoftwareSerial portTwo<span class="br0">(</span><span class="nu0">4</span><span class="sy0">,</span> <span class="nu0">5</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="co1">// software serial : TX = digital pin 8, RX = digital pin 9</span><br />
+SoftwareSerial portTwo<span class="br0">(</span><span class="nu0">8</span><span class="sy0">,</span> <span class="nu0">9</span><span class="br0">)</span><span class="sy0">;</span><br />
<br />
<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
<span class="br0">{</span><br />
diff --git a/reference/SoftwareSerialOverflow.html b/reference/SoftwareSerialOverflow.html
index abdb8bd..1c36c91 100644
--- a/reference/SoftwareSerialOverflow.html
+++ b/reference/SoftwareSerialOverflow.html
@@ -121,7 +121,9 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2><span class='wikiword'>SoftwareSerial</span>: overflow()</h2>
<h4>Description</h4>
-<p>Tests to see if a software serial buffer overflow has occurred. A software serial buffer can hold 64 bytes.
+<p>Tests to see if a software serial buffer overflow has occurred. Calling this function clears the overflow flag, meaning that subsequent calls will return false unless another byte of data has been received and discarded in the meantime.
+</p>
+<p class='vspace'></p><p>The software serial buffer can hold 64 bytes.
</p>
<p class='vspace'></p><h4>Syntax</h4>
<p>mySerial.overflow()
@@ -137,8 +139,8 @@ a.varlink { text-decoration:none; }
<div class='sourceblock ' id='sourceblock1'>
<div class='sourceblocktext'><div class="arduino"><span class="co2">#include <SoftwareSerial.h></span><br />
<br />
-<span class="co1">// software serial : TX = digital pin 2, RX = digital pin 3</span><br />
-SoftwareSerial portOne<span class="br0">(</span><span class="nu0">2</span><span class="sy0">,</span> <span class="nu0">3</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="co1">// software serial : TX = digital pin 10, RX = digital pin 11</span><br />
+SoftwareSerial portOne<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span><span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span><br />
<br />
<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
<span class="br0">{</span><br />
diff --git a/reference/SoftwareSerialPeek.html b/reference/SoftwareSerialPeek.html
new file mode 100644
index 0000000..0146664
--- /dev/null
+++ b/reference/SoftwareSerialPeek.html
@@ -0,0 +1,179 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - SoftwareSerialPeek </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2><span class='wikiword'>SoftwareSerial</span>: peek</h2>
+<h4>Description</h4>
+<p>Return a character that was received on the RX pin of the software serial port. Unlike <a class='wikilink' href='SoftwareSerialRead.html'>read()</a>, however, subsequent calls to this function will return the same character.
+</p>
+<p class='vspace'></p><p>Note that only one <span class='wikiword'>SoftwareSerial</span> instance can receive incoming data at a time (select which one with the <a class='wikilink' href='SoftwareSerialListen.html'>listen()</a> function).
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>the character read, or -1 if none is available
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino">SoftwareSerial mySerial<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span><span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
+<span class="br0">{</span><br />
+ mySerial.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><br />
+<span class="br0">{</span><br />
+ <span class="kw1">char</span> c <span class="sy0">=</span> mySerial.<span class="me1">peek</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
+
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='SoftwareSerialConstructor.html'>SoftwareSerial</a>()
+</li><li><a class='wikilink' href='SoftwareSerialBegin.html'>begin</a>()
+</li><li><a class='wikilink' href='SoftwareSerialPrint.html'>print</a>()
+</li><li><a class='wikilink' href='SoftwareSerialPrintln.html'>println</a>()
+</li><li><a class='wikilink' href='SoftwareSerialRead.html'>read</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/SoftwareSerialPrint.html b/reference/SoftwareSerialPrint.html
index d7c78d3..e2f6a20 100644
--- a/reference/SoftwareSerialPrint.html
+++ b/reference/SoftwareSerialPrint.html
@@ -132,7 +132,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><h4>Example</h4>
<p>
<div class='sourceblock ' id='sourceblock1'>
- <div class='sourceblocktext'><div class="arduino">SoftwareSerial serial<span class="br0">(</span><span class="nu0">6</span><span class="sy0">,</span> <span class="nu0">7</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <div class='sourceblocktext'><div class="arduino">SoftwareSerial serial<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span><span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span><br />
<span class="kw1">int</span> analogValue<span class="sy0">;</span><br />
<br />
<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
@@ -143,7 +143,7 @@ a.varlink { text-decoration:none; }
<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><br />
<span class="br0">{</span><br />
<span class="co1">// read the analog input on pin 0:</span><br />
- analogValue <span class="sy0">=</span> <span class="kw1">analogRead</span><span class="br0">(</span><span class="nu0">0</span><span class="br0">)</span><span class="sy0">;</span><br />
+ analogValue <span class="sy0">=</span> <span class="kw1">analogRead</span><span class="br0">(</span>A0<span class="br0">)</span><span class="sy0">;</span><br />
<br />
<span class="co1">// print it out in many formats:</span><br />
serial.<span class="kw1">print</span><span class="br0">(</span>analogValue<span class="br0">)</span><span class="sy0">;</span> <span class="co1">// print as an ASCII-encoded decimal</span><br />
diff --git a/reference/SoftwareSerialPrintln.html b/reference/SoftwareSerialPrintln.html
index 3d892b3..17f8324 100644
--- a/reference/SoftwareSerialPrintln.html
+++ b/reference/SoftwareSerialPrintln.html
@@ -132,7 +132,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><h4>Example</h4>
<p>
<div class='sourceblock ' id='sourceblock1'>
- <div class='sourceblocktext'><div class="arduino">SoftwareSerial serial<span class="br0">(</span><span class="nu0">6</span><span class="sy0">,</span> <span class="nu0">7</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <div class='sourceblocktext'><div class="arduino">SoftwareSerial serial<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span><span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span><br />
<span class="kw1">int</span> analogValue<span class="sy0">;</span><br />
<br />
<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
@@ -143,7 +143,7 @@ a.varlink { text-decoration:none; }
<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><br />
<span class="br0">{</span><br />
<span class="co1">// read the analog input on pin 0:</span><br />
- analogValue <span class="sy0">=</span> <span class="kw1">analogRead</span><span class="br0">(</span><span class="nu0">0</span><span class="br0">)</span><span class="sy0">;</span><br />
+ analogValue <span class="sy0">=</span> <span class="kw1">analogRead</span><span class="br0">(</span>A0<span class="br0">)</span><span class="sy0">;</span><br />
<br />
<span class="co1">// print it out in many formats:</span><br />
serial.<span class="kw1">print</span><span class="br0">(</span>analogValue<span class="br0">)</span><span class="sy0">;</span> <span class="co1">// print as an ASCII-encoded decimal</span><br />
diff --git a/reference/SoftwareSerialRead.html b/reference/SoftwareSerialRead.html
index 53e2f1f..589917a 100644
--- a/reference/SoftwareSerialRead.html
+++ b/reference/SoftwareSerialRead.html
@@ -31,6 +31,59 @@ type='text/css' />
.lfloat { float:left; margin-right:0.5em; }
.rfloat { float:right; margin-left:0.5em; }
a.varlink { text-decoration:none; }
+/**
+ * GeSHi (C) 2004 - 2007 Nigel McNie, 2007 - 2008 Benny Baumann
+ * (http://qbnz.com/highlighter/ and http://geshi.org/)
+ */
+.arduino {font-family:monospace;}
+.arduino .imp {font-weight: bold; color: red;}
+.arduino .kw1 {color: #CC6600;}
+.arduino .kw2 {color: #006699;}
+.arduino .kw3 {color: #CC6600; font-weight: bold;}
+.arduino .co1 {color: #7E7E7E; font-style: italic;}
+.arduino .co2 {color: #7E7E7E;}
+.arduino .coMULTI {color: #7E7E7E; font-style: italic;}
+.arduino .es0 {color: #000099; font-weight: bold;}
+.arduino .es1 {color: #000099; font-weight: bold;}
+.arduino .es2 {color: #660099; font-weight: bold;}
+.arduino .es3 {color: #660099; font-weight: bold;}
+.arduino .es4 {color: #660099; font-weight: bold;}
+.arduino .es5 {color: #006699; font-weight: bold;}
+.arduino .br0 {color: #000000;}
+.arduino .sy0 {color: #000000;}
+.arduino .st0 {color: #0066CC;}
+.arduino .nu0 {color: #000000;}
+.arduino .nu6 {color: #208080;}
+.arduino .nu8 {color: #208080;}
+.arduino .nu12 {color: #208080;}
+.arduino .nu16 {color:#800080;}
+.arduino .nu17 {color:#800080;}
+.arduino .nu18 {color:#800080;}
+.arduino .nu19 {color:#800080;}
+.arduino .me1 {color: #ff1493;}
+.arduino .me2 {color: #ff1493;}
+.arduino span.xtra { display:block; }
+
+.sourceblocklink {
+ text-align: right;
+ font-size: smaller;
+}
+.sourceblocktext {
+ padding: 0.5em;
+ color: #000000;
+ background-color: #ffffff;
+}
+.sourceblocktext div {
+ font-family: monospace;
+ font-size: small;
+ line-height: 1;
+ height: 1%;
+}
+.sourceblocktext div.head,
+.sourceblocktext div.foot {
+ font: italic medium serif;
+ padding: 0.5em;
+}
--></style> <meta name='robots' content='index,follow' />
@@ -66,29 +119,34 @@ a.varlink { text-decoration:none; }
<div id='wikitext'>
<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
</p>
-<p class='vspace'></p><h2><span class='wikiword'>SoftwareSerial</span>: int read()</h2>
+<p class='vspace'></p><h2><span class='wikiword'>SoftwareSerial</span>: read</h2>
<h4>Description</h4>
-<p>Reads a character from the receive pin of the software serial port. This function waits for a character to arrive, reads it, and returns the character read. Data that arrives at other times is lost.
+<p>Return a character that was received on the RX pin of the software serial port. Note that only one <span class='wikiword'>SoftwareSerial</span> instance can receive incoming data at a time (select which one with the <a class='wikilink' href='SoftwareSerialListen.html'>listen()</a> function).
</p>
<p class='vspace'></p><h4>Parameters</h4>
<p>none
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>the character read
+<p>the character read, or -1 if none is available
</p>
<p class='vspace'></p><h4>Example</h4>
-<pre>SoftwareSerial serial(6, 7);
-
-void setup()
-{
- serial.begin(9600);
-}
+<p>
+<div class='sourceblock ' id='sourceblock1'>
+ <div class='sourceblocktext'><div class="arduino">SoftwareSerial mySerial<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span><span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
+<span class="br0">{</span><br />
+ mySerial.<span class="kw1">begin</span><span class="br0">(</span><span class="nu0">9600</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span><br />
+<br />
+<span class="kw1">void</span> <span class="kw3">loop</span><span class="br0">(</span><span class="br0">)</span><br />
+<span class="br0">{</span><br />
+ <span class="kw1">char</span> c <span class="sy0">=</span> mySerial.<span class="kw1">read</span><span class="br0">(</span><span class="br0">)</span><span class="sy0">;</span><br />
+<span class="br0">}</span></div></div>
+ <div class='sourceblocklink'><a href='#' type='text/plain'>[Get Code]</a></div>
+</div>
-void loop()
-{
- char c = serial.read();
-}
-</pre>
+</p>
<p class='vspace'></p><h4>See also</h4>
<ul><li><a class='wikilink' href='SoftwareSerialConstructor.html'>SoftwareSerial</a>()
</li><li><a class='wikilink' href='SoftwareSerialBegin.html'>begin</a>()
diff --git a/reference/SoftwareSerialWrite.html b/reference/SoftwareSerialWrite.html
index a58b183..6f0ca9d 100644
--- a/reference/SoftwareSerialWrite.html
+++ b/reference/SoftwareSerialWrite.html
@@ -132,7 +132,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><h4>Example</h4>
<p>
<div class='sourceblock ' id='sourceblock1'>
- <div class='sourceblocktext'><div class="arduino">SoftwareSerial mySerial<span class="br0">(</span><span class="nu0">6</span><span class="sy0">,</span> <span class="nu0">7</span><span class="br0">)</span><span class="sy0">;</span><br />
+ <div class='sourceblocktext'><div class="arduino">SoftwareSerial mySerial<span class="br0">(</span><span class="nu0">10</span><span class="sy0">,</span> <span class="nu0">11</span><span class="br0">)</span><span class="sy0">;</span><br />
<br />
<span class="kw1">void</span> <span class="kw3">setup</span><span class="br0">(</span><span class="br0">)</span><br />
<span class="br0">{</span><br />
diff --git a/reference/Stepper.html b/reference/Stepper.html
index 5d74423..12639de 100644
--- a/reference/Stepper.html
+++ b/reference/Stepper.html
@@ -67,7 +67,7 @@ a.varlink { text-decoration:none; }
<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
</p>
<p class='vspace'></p><h2>Stepper Library</h2>
-<p>This library allows you to control unipolar or bipolar stepper motors. To use it you will need a stepper motor, and the appropriate hardware to control it. For more on that, see <a class='urllink' href='http://www.tigoe.net/pcomp/code/category/code/arduinowiring/51' rel='nofollow'>Tom Igoe's notes on steppers</a>.
+<p>This library allows you to control unipolar or bipolar stepper motors. To use it you will need a stepper motor, and the appropriate hardware to control it. For more on that, see <a class='urllink' href='http://www.tigoe.net/pcomp/code/circuits/motors/stepper-motors/' rel='nofollow'>Tom Igoe's notes on steppers</a>.
</p>
<p class='vspace'></p><h4>Circuits</h4>
<ul><li><a class='wikilink' href='StepperUnipolarCircuit.html'>Unipolar Steppers</a>
diff --git a/reference/StepperStep.html b/reference/StepperStep.html
index 3f12791..1b39350 100644
--- a/reference/StepperStep.html
+++ b/reference/StepperStep.html
@@ -68,7 +68,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2>Stepper: step(steps)</h2>
<h4>Description</h4>
-<p>Turns the motor a specific number of steps, at a speed determined by the most recent call to setSpeed(). This function is blocking; that is, it will wait until the motor has finished moving to pass control to the next line in your sketch. For example, if you set the speed to, say, 1 RPM and called step(100) on a 100-step motor, this function would take a full minute to run. For better control, keep the speed high and only go a few steps with each call to step().
+<p>Turns the motor a specific number of steps, at a speed determined by the most recent call to setSpeed(). <strong> This function is blocking</strong>; that is, it will wait until the motor has finished moving to pass control to the next line in your sketch. For example, if you set the speed to, say, 1 RPM and called step(100) on a 100-step motor, this function would take a full minute to run. For better control, keep the speed high and only go a few steps with each call to step().
</p>
<p class='vspace'></p><h4>Parameters</h4>
<p>steps: the number of steps to turn the motor - positive to turn one direction, negative to turn the other (<em>int</em>)
diff --git a/reference/Stream.html b/reference/Stream.html
new file mode 100644
index 0000000..38e700d
--- /dev/null
+++ b/reference/Stream.html
@@ -0,0 +1,112 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - Stream </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>Stream</h2>
+<p>Stream is the base class for character and binary based streams. It is not called directly, but invoked whenever you use a function that relies on it.
+</p>
+<p class='vspace'></p><p>Stream defines the reading functions in Arduino. When using any core functionality that uses a read() or similar method, you can safely assume it calls on the Stream class. For functions like print(), Stream inherits from the Print class.
+</p>
+<p class='vspace'></p><p>Some of the libraries that rely on Stream include :
+</p>
+<p class='vspace'></p><ul><li><a class='wikilink' href='Serial.html'>Serial</a>
+</li><li><a class='wikilink' href='Wire.html'>Wire</a>
+</li><li><a class='wikilink' href='Ethernet.html'>Ethernet Client</a>
+</li><li><a class='wikilink' href='Ethernet.html'>Ethernet Server</a>
+</li><li><a class='wikilink' href='SD.html'>SD</a>
+</li></ul><p class='vspace'></p><h4>Functions</h4>
+<ul><li><a class='wikilink' href='StreamAvailable.html'>available</a>()
+</li><li><a class='wikilink' href='StreamRead.html'>read</a>()
+</li><li><a class='wikilink' href='StreamFlush.html'>flush</a>()
+</li><li><a class='wikilink' href='StreamFind.html'>find</a>()
+</li><li><a class='wikilink' href='StreamFindUntil.html'>findUntil</a>()
+</li><li><a class='wikilink' href='StreamPeek.html'>peek</a>()
+</li><li><a class='wikilink' href='StreamReadBytes.html'>readBytes</a>()
+</li><li><a class='wikilink' href='StreamReadBytesUntil.html'>readBytesUntil</a>()
+</li><li><a class='wikilink' href='StreamParseInt.html'>parseInt</a>()
+</li><li><a class='wikilink' href='StreamParseFloat.html'>parsefloat</a>()
+</li><li><a class='wikilink' href='StreamSetTimeout.html'>setTimeout</a>()<br /><br /><a class='wikilink' href='index.html'>Reference Home</a>
+</li></ul><p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamAvailable.html b/reference/StreamAvailable.html
new file mode 100644
index 0000000..99feb93
--- /dev/null
+++ b/reference/StreamAvailable.html
@@ -0,0 +1,105 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamAvailable </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>available()</h2>
+<h4>Description</h4>
+<p>available() gets the number of bytes available in the stream. This is only for bytes that have already arrived.
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.available()<br />
+</p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br />
+</p><h4>Returns</h4>
+<p>int : the number of bytes available to read
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamFind.html b/reference/StreamFind.html
new file mode 100644
index 0000000..2fd01b1
--- /dev/null
+++ b/reference/StreamFind.html
@@ -0,0 +1,106 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamFind </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>find()</h2>
+<h4>Description</h4>
+<p>find() reads data from the stream until the target string of given length is found
+The function returns true if target string is found, false if timed out.
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.find(<em>target</em>)<br />
+</p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br /><em>target</em> : the string to search for (char)<br />
+</p><h4>Returns</h4>
+<p>boolean<br />
+</p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+<a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamFindUntil.html b/reference/StreamFindUntil.html
new file mode 100644
index 0000000..5513812
--- /dev/null
+++ b/reference/StreamFindUntil.html
@@ -0,0 +1,108 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamFindUntil </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>findUntil()</h2>
+<h4>Description</h4>
+<p>findUntil() reads data from the stream until the target string of given length or terminator string is found.
+</p>
+<p class='vspace'></p><p>The function returns true if target string is found, false if timed out
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.findUntil(<em>target</em>, <em>terminal</em>)<br />
+</p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br /><em>target</em> : the string to search for (char)<br /><em>terminal</em> : the terminal string in the search (char)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>boolean<br />
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamFlush.html b/reference/StreamFlush.html
new file mode 100644
index 0000000..25e422b
--- /dev/null
+++ b/reference/StreamFlush.html
@@ -0,0 +1,105 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamFlush </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>flush()</h2>
+<h4>Description</h4>
+<p>flush() clears the buffer once all outgoing characters have been sent.
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.flush()<br />
+</p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br />
+</p><h4>Returns</h4>
+<p>boolean<br />
+</p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+<a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamParseFloat.html b/reference/StreamParseFloat.html
new file mode 100644
index 0000000..3372a54
--- /dev/null
+++ b/reference/StreamParseFloat.html
@@ -0,0 +1,108 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamParseFloat </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>parseFloat()</h2>
+<h4>Description</h4>
+<p>parseFloat() returns the first valid floating point number from the current position. Initial characters that are not digits (or the minus sign) are skipped.
+parseFloat() is terminated by the first character that is not a floating point number.
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.parseFloat(<em>list</em>)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br /><em>list</em> : the stream to check for floats (char)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>float
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamParseInt.html b/reference/StreamParseInt.html
new file mode 100644
index 0000000..3d3cee4
--- /dev/null
+++ b/reference/StreamParseInt.html
@@ -0,0 +1,108 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamParseInt </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>parseInt()</h2>
+<h4>Description</h4>
+<p>parseInt() returns the first valid (long) integer number from the current position. Initial characters that are not integers (or the minus sign) are skipped.
+parseInt() is terminated by the first character that is not a digit.
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.parseInt(<em>list</em>)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br /><em>list</em> : the stream to check for ints (char)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>int
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamPeek.html b/reference/StreamPeek.html
new file mode 100644
index 0000000..2314ddf
--- /dev/null
+++ b/reference/StreamPeek.html
@@ -0,0 +1,106 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamPeek </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>peek()</h2>
+<p>Read a byte from the file without advancing to the next one. That is, successive calls to peek() will return the same value, as will the next call to read().
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.peek()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br />
+</p><h4>Returns</h4>
+<p>The next byte (or character), or -1 if none is available.
+</p>
+<p class='vspace'></p><h4>See Also</h4>
+<ul><li><a class='wikilink' href='StreamAvailable.html'>available()</a>
+</li><li><a class='wikilink' href='StreamRead.html'>read()</a>
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamRead.html b/reference/StreamRead.html
new file mode 100644
index 0000000..4ceb40a
--- /dev/null
+++ b/reference/StreamRead.html
@@ -0,0 +1,106 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamRead </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>read()</h2>
+<h4>Description</h4>
+<p>read() reads characters from an incoming stream to the buffer.
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.read()<br />
+</p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br />
+</p><h4>Returns</h4>
+<p>the first byte of incoming data available (or -1 if no data is available)
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+<a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamReadBytes.html b/reference/StreamReadBytes.html
new file mode 100644
index 0000000..b3f42fe
--- /dev/null
+++ b/reference/StreamReadBytes.html
@@ -0,0 +1,109 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamReadBytes </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>readBytes()</h2>
+<h4>Description</h4>
+<p>readBytes() read characters from a stream into a buffer. The function terminates if the determined length has been read, or it times out (see <a class='wikilink' href='StreamSetTimeout.html'>setTimeout</a>()).
+</p>
+<p class='vspace'></p><p>readBytes() returns the number of characters placed in the buffer. A 0 means no valid data was found.
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.readBytes(buffer, length)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br />buffer: the buffer to store the bytes in (char[] or byte[])<br />length : the number of bytes to read (int)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>byte
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamReadBytesUntil.html b/reference/StreamReadBytesUntil.html
new file mode 100644
index 0000000..d5901ea
--- /dev/null
+++ b/reference/StreamReadBytesUntil.html
@@ -0,0 +1,110 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamReadBytesUntil </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>readBytesUntil()</h2>
+<h4>Description</h4>
+<p>readBytesUntil() read characters from a stream into a buffer. The function terminates if the terminator character is detected, the determined length has been read, or it times out (see <a class='wikilink' href='StreamSetTimeout.html'>setTimeout</a>()).
+</p>
+<p class='vspace'></p><p>readBytesUntil() returns the number of characters placed in the buffer. A 0 means no valid data was found.
+</p>
+<p class='vspace'></p><p>This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.readBytesUntil(<em>character</em>, <em>buffer</em>, <em>length</em>)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br /><em>character</em> : the character to search for (char)<br /><em>buffer</em>: the buffer to store the bytes in (char[] or byte[])
+<em>length</em> : the number of bytes to read (int)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>byte
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StreamSetTimeout.html b/reference/StreamSetTimeout.html
new file mode 100644
index 0000000..74016a9
--- /dev/null
+++ b/reference/StreamSetTimeout.html
@@ -0,0 +1,105 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StreamSetTimeout </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><h2>setTimeout()</h2>
+<h4>Description</h4>
+<p>setTimeout() sets the maximum milliseconds to wait for stream data, it defaults to 1000 milliseconds. This function is part of the Stream class, and is called by any class that inherits from it (Wire, Serial, etc). See the <a class='wikilink' href='Stream.html'>Stream class</a> main page for more information.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>stream</em>.setTimeout(<em>time</em>)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p><em>stream</em> : an instance of a class that inherits from Stream.<br /><em>time</em> : timeout duration in milliseconds (long).
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>None
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringBrackets.html b/reference/StringBrackets.html
new file mode 100644
index 0000000..b8af903
--- /dev/null
+++ b/reference/StringBrackets.html
@@ -0,0 +1,109 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringBrackets </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>[] (element access)</h2>
+<h4>Description</h4>
+<p>Allows you access to the individual characters of a string.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>char thisChar = string1[n]
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>char thisChar - a character variable<br />string1 - a string variable<br />int n - a numeric variable
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>the nth char of the string. Same as <a class='wikilink' href='StringCharAt.html'>charAt()</a>.
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringCharacters'>StringCharacters</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringCharAt.html'>StringCharAt</a>
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringCharAt.html b/reference/StringCharAt.html
new file mode 100644
index 0000000..1176659
--- /dev/null
+++ b/reference/StringCharAt.html
@@ -0,0 +1,108 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringCharAt </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>charAt()</h2>
+<h4>Description</h4>
+<p>Access a particular character of the String.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.charAt(n)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String<br />n: the character to access
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>the n'th character of the String
+</p>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringSetCharAt.html'>setCharAt</a>()
+</li><li><a class='wikilink' href='StringBrackets.html'>[]</a>
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringCompareTo.html b/reference/StringCompareTo.html
new file mode 100644
index 0000000..fc5350a
--- /dev/null
+++ b/reference/StringCompareTo.html
@@ -0,0 +1,109 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringCompareTo </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>compareTo()</h2>
+<h4>Description</h4>
+<p>Compares two Strings, testing whether one comes before or after the other, or whether they're equal. The strings are compared character by character, using the ASCII values of the characters. That means, for example, that 'a' comes before 'b' but after 'A'. Numbers come before letters.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.compareTo(string2)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String <br />string2: another variable of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>a negative number: if string comes before string2<br />0: if string equals string2<br />a positive number: if string comes after string2
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringComparisonOperators'>StringComparisonOperators</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringSubstring.html'>substring</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringComparison.html b/reference/StringComparison.html
new file mode 100644
index 0000000..a04d726
--- /dev/null
+++ b/reference/StringComparison.html
@@ -0,0 +1,111 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringComparison </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>== operator</h2>
+<h4>Description</h4>
+<p>Compares two strings for equality. The comparison is case-sensitive, meaning the String "hello" is not equal to the String "HELLO". Functionally the same as <a class='wikilink' href='StringEquals.html'>string.equals()</a>
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string1</em> == <em>string2</em>
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string1, string2: variables of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>true: if string1 equals string2 <br />false: otherwise
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringComparisonOperators'>StringComparisonOperators</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringEquals.html'>equals</a>()
+</li><li><a class='wikilink' href='StringEqualsIgnoreCase.html'>equalsIgnoreCase</a>()
+</li><li><a class='wikilink' href='StringCompareTo.html'>compareTo</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringConcat.html b/reference/StringConcat.html
new file mode 100644
index 0000000..b34945a
--- /dev/null
+++ b/reference/StringConcat.html
@@ -0,0 +1,107 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringConcat </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>concat()</h2>
+<h4>Description</h4>
+<p>Combines, or <em>concatenates</em> two strings into one new String. The second string is appended to the first, and the result is placed in a new String
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.concat(string, string2)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string, string2: variables of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>new String that is the combination of the original two Strings
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringAppendOperator'>StringAppendOperator</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringAdditionOperator'>String Addition operator</a><br /><br /><a class='wikilink' href='index.html'>Reference Home</a>
+</li></ul><p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringConstructor.html b/reference/StringConstructor.html
new file mode 100644
index 0000000..12728d6
--- /dev/null
+++ b/reference/StringConstructor.html
@@ -0,0 +1,141 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringConstructor </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>String()</h2>
+<h4>Description</h4>
+<p>Constructs an instance of the String class. There are multiple versions that construct Strings from different data types (i.e. format them as sequences of characters), including:
+</p><ul><li>a constant string of characters, in double quotes (i.e. a char array)
+</li><li>a single constant character, in single quotes
+</li><li>another instance of the String object
+</li><li>a constant integer or long integer
+</li><li>a constant integer or long integer, using a specified base
+</li><li>an integer or long integer variable
+</li><li>an integer or long integer variable, using a specified base
+</li></ul><p class='vspace'></p><p>Constructing a String from a number results in a string that contains the ASCII representation of that number. The default is base ten, so
+</p>
+<p class='vspace'></p><p><code>String thisString = String(13)</code>
+</p>
+<p class='vspace'></p><p>gives you the String "13". You can use other bases, however. For example,
+</p>
+<p class='vspace'></p><p><code>String thisString = String(13, HEX)</code>
+</p>
+<p class='vspace'></p><p>gives you the String "D", which is the hexadecimal representation of the decimal value 13. Or if you prefer binary,
+</p>
+<p class='vspace'></p><p><code>String thisString = String(13, BIN)</code>
+</p>
+<p class='vspace'></p><p>gives you the String "1011", which is the binary representation of 13.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>String(val)<br />String(val, base)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>val: a variable to format as a String - <em>string</em>, <em>char</em>, <em>byte</em>, <em>int</em>, <em>long</em>, <em>unsigned int</em>, <em>unsigned long</em><br />base (<em>optional</em>) - the base in which to format an integral value
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>an instance of the String class
+</p>
+<p class='vspace'></p><h3>Examples</h3>
+<p>All of the following are valid declarations for Strings.
+</p><pre>
+String stringOne = "Hello String"; // using a constant String
+String stringOne = String('a'); // converting a constant char into a String
+String stringTwo = String("This is a string"); // converting a constant string into a String object
+String stringOne = String(stringTwo + " with more"); // concatenating two strings
+String stringOne = String(13); // using a constant integer
+String stringOne = String(analogRead(0), DEC); // using an int and a base
+String stringOne = String(45, HEX); // using an int and a base (hexadecimal)
+String stringOne = String(255, BIN); // using an int and a base (binary)
+String stringOne = String(millis(), DEC); // using a long and a base
+
+</pre>
+<p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringConstructors'>String Constructor Tutorial</a>
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringEndsWith.html b/reference/StringEndsWith.html
new file mode 100644
index 0000000..1c52731
--- /dev/null
+++ b/reference/StringEndsWith.html
@@ -0,0 +1,111 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringEndsWith </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>endsWith()</h2>
+<h4>Description</h4>
+<p>Tests whether or not a String ends with the characters of another String.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.endsWith(string2)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String<br />string2: another variable of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>true: if string ends with the characters of string2<br />false: otherwise
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringStartsWithEndsWith'>StringStartsWithEndsWith</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringStartsWith.html'>startsWith</a>()
+</li><li><a class='wikilink' href='StringLastIndexOf.html'>lastIndexOf</a>()
+</li><li><a class='wikilink' href='StringIndexOf.html'>indexOf</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringEquals.html b/reference/StringEquals.html
new file mode 100644
index 0000000..61ab359
--- /dev/null
+++ b/reference/StringEquals.html
@@ -0,0 +1,110 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringEquals </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>equals()</h2>
+<h4>Description</h4>
+<p>Compares two strings for equality. The comparison is case-sensitive, meaning the String "hello" is not equal to the String "HELLO".
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.equals(string2)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string, string2: variables of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>true: if string equals string2 <br />false: otherwise
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringComparisonOperators'>StringComparisonOperators</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringEqualsIgnoreCase.html'>equalsIgnoreCase</a>()
+</li><li><a class='wikilink' href='StringCompareTo.html'>compareTo</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringEqualsIgnoreCase.html b/reference/StringEqualsIgnoreCase.html
new file mode 100644
index 0000000..108f29d
--- /dev/null
+++ b/reference/StringEqualsIgnoreCase.html
@@ -0,0 +1,110 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringEqualsIgnoreCase </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>equalsIgnoreCase()</h2>
+<h4>Description</h4>
+<p>Compares two strings for equality. The comparison is not case-sensitive, meaning the String("hello") is equal to the String("HELLO").
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.equalsIgnoreCase(string2)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string, string2: variables of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>true: if string equals string2 (ignoring case) <br />false: otherwise
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringComparisonOperators'>StringComparisonOperators</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringEquals.html'>equals</a>()
+</li><li><a class='wikilink' href='StringCompareTo.html'>compareTo</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringGetBytes.html b/reference/StringGetBytes.html
new file mode 100644
index 0000000..7894bce
--- /dev/null
+++ b/reference/StringGetBytes.html
@@ -0,0 +1,112 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringGetBytes </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>getBytes()</h2>
+<p class='vspace'></p><h4>Description</h4>
+<p>Copies the string's characters to the supplied buffer.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.getBytes(buf, len)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String
+</p>
+<p class='vspace'></p><p>buf: the buffer to copy the characters into (<em>byte []</em>)
+</p>
+<p class='vspace'></p><p>len: the size of the buffer (<em>unsigned int</em>)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>None
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<h4>See also</h4>
+<ul><li><a class='wikilink' href='StringToCharArray.html'>toCharArray</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringIndexOf.html b/reference/StringIndexOf.html
new file mode 100644
index 0000000..fe438f3
--- /dev/null
+++ b/reference/StringIndexOf.html
@@ -0,0 +1,111 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringIndexOf </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>indexOf()</h2>
+<h4>Description</h4>
+<p>Locates a character or String within another String. By default, searches from the beginning of the String, but can also start from a given index, allowing for the locating of all instances of the character or String.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.indexOf(val)<br /><em>string</em>.indexOf(val, from)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String<br />val: the value to search for - <em>char</em> or <em>String</em><br />from: the index to start the search from
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>The index of val within the String, or -1 if not found.
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringIndexOf'>StringIndexOf</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringLastIndexOf.html'>lastIndexOf</a>()
+</li><li><a class='wikilink' href='StringStartsWith.html'>startsWith</a>()
+</li><li><a class='wikilink' href='StringEndsWith.html'>endsWith</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringLastIndexOf.html b/reference/StringLastIndexOf.html
new file mode 100644
index 0000000..be39eef
--- /dev/null
+++ b/reference/StringLastIndexOf.html
@@ -0,0 +1,111 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringLastIndexOf </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>lastIndexOf()</h2>
+<h4>Description</h4>
+<p>Locates a character or String within another String. By default, searches from the end of the String, but can also work backwards from a given index, allowing for the locating of all instances of the character or String.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.lastIndexOf(val)<br /><em>string</em>.lastIndexOf(val, from)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String<br />val: the value to search for - <em>char</em> or <em>String</em><br />from: the index to work backwards from
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>The index of val within the String, or -1 if not found.
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringIndexOf'>StringIndexOf</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringIndexOf.html'>indexOf</a>()
+</li><li><a class='wikilink' href='StringStartsWith.html'>startsWith</a>()
+</li><li><a class='wikilink' href='StringEndsWith.html'>endsWith</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringLength.html b/reference/StringLength.html
new file mode 100644
index 0000000..4966842
--- /dev/null
+++ b/reference/StringLength.html
@@ -0,0 +1,107 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringLength </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>length()</h2>
+<h4>Description</h4>
+<p>Returns the length of the String, in characters. (Note that this doesn't include a trailing null character.)
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.length()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>The length of the String in characters.
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringLengthTrim'>StringLengthTrim</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringPlus.html b/reference/StringPlus.html
new file mode 100644
index 0000000..9a6fc3b
--- /dev/null
+++ b/reference/StringPlus.html
@@ -0,0 +1,110 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringPlus </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>+ operator</h2>
+<h4>Description</h4>
+<p>Combines, or <em>concatenates</em> two strings into one new String. The second string is appended to the first, and the result is placed in a new String. Works the same as <a class='wikilink' href='StringConcat.html'>string.concat()</a>.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>string3 = string1 + string 2;
+string3 += string2;
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string, string2, string3: variables of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>new String that is the combination of the original two Strings
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringAppendOperator'>StringAppendOperator</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringAdditionOperator'>String Addition operator</a>
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringReplace.html b/reference/StringReplace.html
new file mode 100644
index 0000000..7426e99
--- /dev/null
+++ b/reference/StringReplace.html
@@ -0,0 +1,111 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringReplace </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>replace()</h2>
+<h4>Description</h4>
+<p>The String replace() function allows you to replace all instances of a given character with another character. You can also use replace to replace substrings of a string with a different substring.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.replace(substring1, substring2)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String <br />substring1: another variable of type String<br />substring2: another variable of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>another String containing the new string with replaced characters.
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringReplace'>StringReplace</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringSubstring.html'>substring</a>()
+</li><li><a class='wikilink' href='StringToLowerCase.html'>toLowerCase</a>()
+</li><li><a class='wikilink' href='StringToUpperCase.html'>toUpperCase</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringSetCharAt.html b/reference/StringSetCharAt.html
new file mode 100644
index 0000000..21ca3d5
--- /dev/null
+++ b/reference/StringSetCharAt.html
@@ -0,0 +1,108 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringSetCharAt </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>setCharAt()</h2>
+<h4>Description</h4>
+<p>Sets a character of the String. Has no effect on indices outside the existing length of the String.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.setCharAt(index, c)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String<br />index: the index to set the character at<br />c: the character to store to the given location
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>None
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<h4>See also</h4>
+<ul><li><a class='wikilink' href='StringCharAt.html'>charAt</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringStartsWith.html b/reference/StringStartsWith.html
new file mode 100644
index 0000000..58c9bbc
--- /dev/null
+++ b/reference/StringStartsWith.html
@@ -0,0 +1,111 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringStartsWith </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>startsWith()</h2>
+<h4>Description</h4>
+<p>Tests whether or not a String starts with the characters of another String.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.startsWith(string2)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string, string2: variable2 of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>true: if string starts with the characters of string2<br />false: otherwise
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringStartsWithEndsWith'>StringStartsWithEndsWith</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringEndsWith.html'>endsWith</a>()
+</li><li><a class='wikilink' href='StringLastIndexOf.html'>lastIndexOf</a>()
+</li><li><a class='wikilink' href='StringIndexOf.html'>indexOf</a>()
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringSubstring.html b/reference/StringSubstring.html
new file mode 100644
index 0000000..4cab97b
--- /dev/null
+++ b/reference/StringSubstring.html
@@ -0,0 +1,107 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringSubstring </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringClass.html'>String</a>
+</p>
+<p class='vspace'></p><h2>substring()</h2>
+<h4>Description</h4>
+<p>Get a substring of a String. The starting index is inclusive (the corresponding character is included in the substring), but the optional ending index is exclusive (the corresponding character is not included in the substring). If the ending index is omitted, the substring continues to the end of the String.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.substring(from)<br /><em>string</em>.substring(from, to)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String<br />from: the index to start the substring at<br />to (<em>optional</em>): the index to end the substring before
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>the substring
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringSubstring'>StringSubstring</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringToCharArray.html b/reference/StringToCharArray.html
new file mode 100644
index 0000000..24b4b17
--- /dev/null
+++ b/reference/StringToCharArray.html
@@ -0,0 +1,112 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringToCharArray </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>toCharArray()</h2>
+<h4>Description</h4>
+<p>Copies the string's characters to the supplied buffer.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.toCharArray(buf, len)
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String
+</p>
+<p class='vspace'></p><p>buf: the buffer to copy the characters into (<em>char []</em>)
+</p>
+<p class='vspace'></p><p>len: the size of the buffer (<em>unsigned int</em>)
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>None
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<h4>See also</h4>
+<ul><li><a class='wikilink' href='StringGetBytes.html'>getBytes</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringToLowerCase.html b/reference/StringToLowerCase.html
new file mode 100644
index 0000000..f93c406
--- /dev/null
+++ b/reference/StringToLowerCase.html
@@ -0,0 +1,109 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringToLowerCase </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>toLowerCase()</h2>
+<h4>Description</h4>
+<p>Get a lower-case version of a String. As of 1.0, toLowerCase() modifies the string in place rather than returning a new one.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.toLowerCase()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringCaseChanges'>StringCaseChanges</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringToUpperCase.html'>toUpperCase</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringToUpperCase.html b/reference/StringToUpperCase.html
new file mode 100644
index 0000000..ac4cf87
--- /dev/null
+++ b/reference/StringToUpperCase.html
@@ -0,0 +1,109 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringToUpperCase </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>toUpperCase()</h2>
+<h4>Description</h4>
+<p>Get an upper-case version of a String. As of 1.0, toUpperCase() modifies the string in place rather than returning a new one.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.toUpperCase()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringCaseChanges'>StringCaseChanges</a>
+</li></ul><p class='vspace'></p><h4>See also</h4>
+<ul><li><a class='wikilink' href='StringToLowerCase.html'>toLowerCase</a>()
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/StringTrim.html b/reference/StringTrim.html
new file mode 100644
index 0000000..eba372e
--- /dev/null
+++ b/reference/StringTrim.html
@@ -0,0 +1,107 @@
+<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN"
+"http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd";>
+<html>
+<head>
+ <title>Arduino Reference - StringTrim </title>
+ <link rel="shortcut icon" type="image/x-icon" href="http://arduino.cc/en/favicon.png";>
+ <link rel='stylesheet' href='arduinoWideRender.css'
+type='text/css' />
+ <!--HeaderText--><style type='text/css'><!--
+ ul, ol, pre, dl, p { margin-top:0px; margin-bottom:0px; }
+ code { white-space: nowrap; }
+ .vspace { margin-top:1.33em; }
+ .indent { margin-left:40px; }
+ .outdent { margin-left:40px; text-indent:-40px; }
+ a.createlinktext { text-decoration:none; border-bottom:1px dotted gray; }
+ a.createlink { text-decoration:none; position:relative; top:-0.5em;
+ font-weight:bold; font-size:smaller; border-bottom:none; }
+ img { border:0px; }
+ .editconflict { color:green;
+ font-style:italic; margin-top:1.33em; margin-bottom:1.33em; }
+
+ table.markup { border: 2px dotted #ccf; width:90%; }
+ td.markup1, td.markup2 { padding-left:10px; padding-right:10px; }
+ td.markup1 { border-bottom: 1px solid #ccf; }
+ div.faq { margin-left:2em; }
+ div.faq p.question { margin: 1em 0 0.75em -2em; font-weight:bold; }
+ div.faq hr { margin-left: -2em; }
+
+ .frame
+ { border:1px solid #cccccc; padding:4px; background-color:#f9f9f9; }
+ .lfloat { float:left; margin-right:0.5em; }
+ .rfloat { float:right; margin-left:0.5em; }
+a.varlink { text-decoration:none; }
+
+--></style> <meta name='robots' content='index,follow' />
+
+ <meta name="verify-v1" content="TtxFIEJAB6zdJ509wLxjnapQzKAMNm9u0Wj4ho6wxIY=" />
+</head>
+<body>
+<div id="page">
+ <!--PageHeaderFmt-->
+ <div id="pageheader">
+ <div class="title"><a href='http://arduino.cc/en'>Arduino</a></div>
+ </div>
+ <!--/PageHeaderFmt-->
+
+ <!--PageLeftFmt-->
+ <div id="pagenav">
+ <div id="navbar">
+ <p><a class='wikilink' href='http://arduino.cc/en/Main/Buy'>Buy</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Software'>Download</a>
+<a class='wikilink' href='Guide_index.html'>Getting Started</a>
+<a class='wikilink' href='http://arduino.cc/en/Tutorial/HomePage'>Learning</a>
+<a class='wikilink' href='index.html'>Reference</a>
+<a class='wikilink' href='http://arduino.cc/en/Main/Hardware'>Hardware</a>
+<a class='wikilink' href='FAQ.html'>FAQ</a>
+</p>
+<p class='vspace'></p>
+
+ </div>
+ </div>
+ <!--/PageLeftFmt-->
+
+ <div id="pagetext">
+ <!--PageText-->
+<div id='wikitext'>
+<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
+</p>
+<p class='vspace'></p><p><a class='wikilink' href='StringObject.html'>String</a>
+</p>
+<p class='vspace'></p><h2>trim()</h2>
+<h4>Description</h4>
+<p>Get a version of the String with any leading and trailing whitespace removed. As of 1.0, trim() modifies the string in place rather than returning a new one.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p><em>string</em>.trim()
+</p>
+<p class='vspace'></p><h4>Parameters</h4>
+<p>string: a variable of type String
+</p>
+<p class='vspace'></p><h4>Returns</h4>
+<p>none
+</p>
+<p class='vspace'></p><h4>Example</h4>
+<ul><li><a class='wikilink' href='http://arduino.cc/en/Tutorial/StringLengthTrim'>StringLengthTrim</a>
+</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</p>
+<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
+</p>
+<p class='vspace'></p><p>The text of the Arduino reference is licensed under a
+<a class='urllink' href='http://creativecommons.org/licenses/by-sa/3.0/' rel='nofollow'>Creative Commons Attribution-ShareAlike 3.0 License</a>. Code samples in the reference are released into the public domain.
+</p>
+</div>
+
+
+ </div>
+
+ <!--PageFooterFmt-->
+ <div id="pagefooter">
+©Arduino |
+ <a href='#'>Edit Page</a> | <a href='#'>Page History</a> | <a href='#' target='_blank'>Printable View</a> | <a href='http://arduino.cc/en/Site/AllRecentChanges'>All Recent Site Changes</a>
+ </div>
+ <!--/PageFooterFmt-->
+
+</div>
+</body>
+</html>
diff --git a/reference/Wire.html b/reference/Wire.html
index 4a2e064..b9c0a4e 100644
--- a/reference/Wire.html
+++ b/reference/Wire.html
@@ -73,15 +73,14 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h4>Functions</h4>
<ul><li><a class='wikilink' href='WireBegin.html'>begin</a>()
-</li><li><a class='wikilink' href='WireBegin.html'>begin</a>(address)
-</li><li><a class='wikilink' href='WireRequestFrom.html'>requestFrom</a>(address, count)
-</li><li><a class='wikilink' href='WireBeginTransmission.html'>beginTransmission</a>(address)
+</li><li><a class='wikilink' href='WireRequestFrom.html'>requestFrom</a>()
+</li><li><a class='wikilink' href='WireBeginTransmission.html'>beginTransmission</a>()
</li><li><a class='wikilink' href='WireEndTransmission.html'>endTransmission</a>()
</li><li><a class='wikilink' href='WireWrite.html'>write</a>()
-</li><li>byte <a class='wikilink' href='WireAvailable.html'>available</a>()
-</li><li>byte <a class='wikilink' href='WireRead.html'>read</a>()
-</li><li><a class='wikilink' href='WireOnReceive.html'>onReceive</a>(handler)
-</li><li><a class='wikilink' href='WireOnRequest.html'>onRequest</a>(handler)
+</li><li><a class='wikilink' href='WireAvailable.html'>available</a>()
+</li><li><a class='wikilink' href='WireRead.html'>read</a>()
+</li><li><a class='wikilink' href='WireOnReceive.html'>onReceive</a>()
+</li><li><a class='wikilink' href='WireOnRequest.html'>onRequest</a>()
</li></ul><p class='vspace'></p><h4>Note</h4>
<p>There are both 7- and 8-bit versions of <span class='wikiword'>I2C</span> addresses. 7 bits identify the device, and the eighth bit determines if it's being written to or read from. The Wire library uses 7 bit addresses throughout. If you have a datasheet or sample code that uses 8 bit address, you'll want to drop the low bit (i.e. shift the value one bit to the right), yielding an address between 0 and 127.
</p>
diff --git a/reference/WireAvailable.html b/reference/WireAvailable.html
index 0d38283..a168525 100644
--- a/reference/WireAvailable.html
+++ b/reference/WireAvailable.html
@@ -79,7 +79,7 @@ a.varlink { text-decoration:none; }
<p>The number of bytes available for reading.
</p>
<p class='vspace'></p><h4>See Also</h4>
-<ul><li><a class='wikilink' href='WireReceive.html'>Wire.receive()</a>
+<ul><li><a class='wikilink' href='WireRead.html'>Wire.read()</a>
</li><li><a class='wikilink' href='StreamAvailable.html'>Stream.available</a>()<br /><a class='wikilink' href='index.html'>Reference Home</a>
</li></ul><p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/WireBeginTransmission.html b/reference/WireBeginTransmission.html
index 3b7f606..b51d7b0 100644
--- a/reference/WireBeginTransmission.html
+++ b/reference/WireBeginTransmission.html
@@ -68,7 +68,7 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2>Wire.beginTransmission(address)</h2>
<h4>Description</h4>
-<p>Begin a transmission to the <span class='wikiword'>I2C</span> slave device with the given address. Subsequently, queue bytes for transmission with the <a class='wikilink' href='WireSend.html'>send()</a> function and transmit them by calling <a class='wikilink' href='WireEndTransmission.html'>endTransmission()</a>.
+<p>Begin a transmission to the <span class='wikiword'>I2C</span> slave device with the given address. Subsequently, queue bytes for transmission with the <a class='wikilink' href='WireWrite.html'>write()</a> function and transmit them by calling <a class='wikilink' href='WireEndTransmission.html'>endTransmission()</a>.
</p>
<p class='vspace'></p><h4>Parameters</h4>
<p>address: the 7-bit address of the device to transmit to
@@ -77,7 +77,7 @@ a.varlink { text-decoration:none; }
<p>None
</p>
<p class='vspace'></p><h4>See Also</h4>
-<ul><li><a class='wikilink' href='WireSend.html'>Wire.send()</a>
+<ul><li><a class='wikilink' href='WireWrite.html'>Wire.write()</a>
</li><li><a class='wikilink' href='WireEndTransmission.html'>Wire.endTransmission()</a>
</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
diff --git a/reference/WireEndTransmission.html b/reference/WireEndTransmission.html
index f966711..0cc6d87 100644
--- a/reference/WireEndTransmission.html
+++ b/reference/WireEndTransmission.html
@@ -68,21 +68,32 @@ a.varlink { text-decoration:none; }
</p>
<p class='vspace'></p><h2>Wire.endTransmission()</h2>
<h4>Description</h4>
-<p>Ends a transmission to a slave device that was begun by <a class='wikilink' href='WireBeginTransmission.html'>beginTransmission()</a> and actually transmits the bytes that were queued by <a class='wikilink' href='WireSend.html'>send()</a>.
+<p>Ends a transmission to a slave device that was begun by <a class='wikilink' href='WireBeginTransmission.html'>beginTransmission()</a> and transmits the bytes that were queued by <a class='wikilink' href='WireWrite.html'>write()</a>.
+</p>
+<p class='vspace'></p><p>As of Arduino 1.0.1, endTransmission() accepts a boolean argument changing its behavior for compatibility with certain <span class='wikiword'>I2C</span> devices.
+</p>
+<p class='vspace'></p><p>If true, endTransmission() sends a stop message after transmission, releasing the <span class='wikiword'>I2C</span> bus.
+</p>
+<p class='vspace'></p><p>If false, endTransmission() sends a restart message after transmission. The bus will not be released, which prevents another master device from transmitting between messages. This allows one master device to send multiple transmissions while in control.
+</p>
+<p class='vspace'></p><p>The default value is true.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Wire.endTransmission()<br />Wire.endTransmission(stop)
</p>
<p class='vspace'></p><h4>Parameters</h4>
-<p>None
+<p>stop : boolean. true will send a stop message, releasing the bus after transmission. false will send a restart, keeping the connection active.
</p>
<p class='vspace'></p><h4>Returns </h4>
<p>byte, which indicates the status of the transmission:
-</p><dl><dt> 0 </dt><dd> success
-</dd><dt> 1 </dt><dd> data too long to fit in transmit buffer
-</dd><dt> 2 </dt><dd> received NACK on transmit of address
-</dd><dt> 3 </dt><dd> received NACK on transmit of data
-</dd><dt> 4 </dt><dd> other error
-</dd></dl><p class='vspace'></p><h4>See Also</h4>
+</p><ul><li>0:success
+</li><li>1:data too long to fit in transmit buffer
+</li><li>2:received NACK on transmit of address
+</li><li>3:received NACK on transmit of data
+</li><li>4:other error
+</li></ul><p class='vspace'></p><h4>See Also</h4>
<ul><li><a class='wikilink' href='WireBeginTransmission.html'>Wire.beginTransmission()</a>
-</li><li><a class='wikilink' href='WireSend.html'>Wire.send()</a>
+</li><li><a class='wikilink' href='WireWrite.html'>Wire.write()</a>
</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
diff --git a/reference/WireOnReceive.html b/reference/WireOnReceive.html
index 5c8b2b6..f75cf89 100644
--- a/reference/WireOnReceive.html
+++ b/reference/WireOnReceive.html
@@ -71,7 +71,7 @@ a.varlink { text-decoration:none; }
<p>Registers a function to be called when a slave device receives a transmission from a master.
</p>
<p class='vspace'></p><h4>Parameters</h4>
-<p>handler: the function to be called when the slave receives data; this should take a single int parameter (the number of bytes received from the master) and return nothing, e.g.: <code>void myHandler(int numBytes)</code>
+<p>handler: the function to be called when the slave receives data; this should take a single int parameter (the number of bytes read from the master) and return nothing, e.g.: <code>void myHandler(int numBytes)</code>
</p>
<p class='vspace'></p><h4>Returns</h4>
<p>None
diff --git a/reference/WireRequestFrom.html b/reference/WireRequestFrom.html
index 5fd503a..318addd 100644
--- a/reference/WireRequestFrom.html
+++ b/reference/WireRequestFrom.html
@@ -66,22 +66,35 @@ a.varlink { text-decoration:none; }
<div id='wikitext'>
<p><strong>Reference</strong> <a class='wikilink' href='index.html'>Language</a> | <a class='wikilink' href='Libraries.html'>Libraries</a> | <a class='wikilink' href='Comparison.html'>Comparison</a> | <a class='wikilink' href='Changes.html'>Changes</a>
</p>
-<p class='vspace'></p><h2>Wire.requestFrom(address, quantity)</h2>
+<p class='vspace'></p><h2>Wire.requestFrom()</h2>
<h4>Description</h4>
-<p>Used by the master to request bytes from a slave device. The bytes may then be retrieved with the <a class='wikilink' href='WireAvailable.html'>available()</a> and <a class='wikilink' href='WireReceive.html'>receive()</a> functions.
+<p>Used by the master to request bytes from a slave device. The bytes may then be retrieved with the <a class='wikilink' href='WireAvailable.html'>available()</a> and <a class='wikilink' href='WireRead.html'>read()</a> functions.
+</p>
+<p class='vspace'></p><p>As of Arduino 1.0.1, requestFrom() accepts a boolean argument changing its behavior for compatibility with certain <span class='wikiword'>I2C</span> devices.
+</p>
+<p class='vspace'></p><p>If true, requestFrom() sends a stop message after the request, releasing the <span class='wikiword'>I2C</span> bus.
+</p>
+<p class='vspace'></p><p>If false, requestFrom() sends a restart message after the request. The bus will not be released, which prevents another master device from requesting between messages. This allows one master device to send multiple requests while in control.
+</p>
+<p class='vspace'></p><p>The default value is true.
+</p>
+<p class='vspace'></p><h4>Syntax</h4>
+<p>Wire.requestFrom(address, quantity)<br />Wire.requestFrom(address, quantity, stop)
</p>
<p class='vspace'></p><h4>Parameters</h4>
<p>address: the 7-bit address of the device to request bytes from
</p>
<p class='vspace'></p><p>quantity: the number of bytes to request
</p>
+<p class='vspace'></p><p>stop : boolean. true will send a stop message after the request, releasing the bus. false will continually send a restart after the request, keeping the connection active.
+</p>
<p class='vspace'></p><h4>Returns</h4>
<p>None
</p>
<p class='vspace'></p><h4>See Also</h4>
<ul><li><a class='wikilink' href='WireAvailable.html'>Wire.available()</a>
-</li><li><a class='wikilink' href='WireReceive.html'>Wire.receive()</a>
-</li></ul><p class='vspace'></p><p><a class='wikilink' href='index.html'>Reference Home</a>
+</li><li><a class='wikilink' href='WireRead.html'>Wire.read()</a>
+</li></ul><p><a class='wikilink' href='index.html'>Reference Home</a>
</p>
<p class='vspace'></p><p><em>Corrections, suggestions, and new documentation should be posted to the <a class='urllink' href='http://arduino.cc/forum/index.php/board,23.0.html' rel='nofollow'>Forum</a>.</em>
</p>
diff --git a/reference/WireWrite.html b/reference/WireWrite.html
index 7fbae71..a5c8966 100644
--- a/reference/WireWrite.html
+++ b/reference/WireWrite.html
@@ -138,7 +138,7 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><p>length: the number of bytes to transmit
</p>
<p class='vspace'></p><h4>Returns</h4>
-<p>byte<br />write() will return the number of bytes written, though reading that number is optional
+<p>byte: write() will return the number of bytes written, though reading that number is optional
</p>
<p class='vspace'></p><h4>Example</h4>
<p>
diff --git a/reference/index.html b/reference/index.html
index 006ea5e..38fcef6 100644
--- a/reference/index.html
+++ b/reference/index.html
@@ -133,7 +133,7 @@ a.varlink { text-decoration:none; }
<h2>Variables</h2>
<h4>Constants</h4>
<ul><li><a class='wikilink' href='Constants.html'>HIGH</a> | <a class='wikilink' href='Constants.html'>LOW</a>
-</li><li><a class='wikilink' href='Constants.html'>INPUT</a> | <a class='wikilink' href='Constants.html'>OUTPUT</a>
+</li><li><a class='wikilink' href='Constants.html'>INPUT</a> | <a class='wikilink' href='Constants.html'>OUTPUT</a>| <a class='wikilink' href='Constants.html'>INPUT_PULLUP</a>
</li><li><a class='wikilink' href='Constants.html'>true</a> | <a class='wikilink' href='Constants.html'>false</a>
</li><li><a class='wikilink' href='IntegerConstants.html'>integer constants</a>
</li><li><a class='wikilink' href='Fpconstants.html'>floating point constants</a>
@@ -205,7 +205,8 @@ a.varlink { text-decoration:none; }
<p class='vspace'></p><ul><li><a class='wikilink' href='RandomSeed.html'>randomSeed</a>()
</li><li><a class='wikilink' href='Random.html'>random</a>()
</li></ul><p class='vspace'></p><p><strong>Bits and Bytes</strong>
-</p><ul><li><a class='wikilink' href='LowByte.html'>lowByte</a>()
+</p>
+<p class='vspace'></p><ul><li><a class='wikilink' href='LowByte.html'>lowByte</a>()
</li><li><a class='wikilink' href='HighByte.html'>highByte</a>()
</li><li><a class='wikilink' href='BitRead.html'>bitRead</a>()
</li><li><a class='wikilink' href='BitWrite.html'>bitWrite</a>()
@@ -223,6 +224,11 @@ a.varlink { text-decoration:none; }
</li></ul><p class='vspace'></p><p><strong>Communication</strong>
</p>
<p class='vspace'></p><ul><li><a class='wikilink' href='Serial.html'>Serial</a>
+</li><li><a class='wikilink' href='Stream.html'>Stream</a>
+</li></ul><p class='vspace'></p><p><strong>Leonardo Specific</strong>
+</p>
+<p class='vspace'></p><ul><li><a class='wikilink' href='MouseKeyboard.html'>Keyboard</a>
+</li><li><a class='wikilink' href='MouseKeyboard.html'>Mouse</a>
</li></ul><p class='vspace'></p><p><strong>Looking for something else?</strong> See the <a class='wikilink' href='Libraries.html'>libraries page</a> for interfacing with particular types of hardware. Try the list of <a class='urllink' href='http://www.arduino.cc/playground/Main/GeneralCodeLibrary' rel='nofollow'>community-contributed code</a>. The Arduino language is based on C/C++. It links against <a class='urllink' href='http://www.nongnu.org/avr-libc/user-manual/modules.html' rel='nofollow'>AVR Libc</a> and allows the use of any of its functions; see its <a class='urllink' href='http://www.nongnu.org/avr-libc/user-manual/index.html' rel='nofollow'>user manual</a> for details.
</p>
<p class='vspace'></p></td></tr></table>
[
Date Prev][
Date Next] [
Thread Prev][
Thread Next]
[
Thread Index]
[
Date Index]
[
Author Index]

{kind=link}
{kind=link}
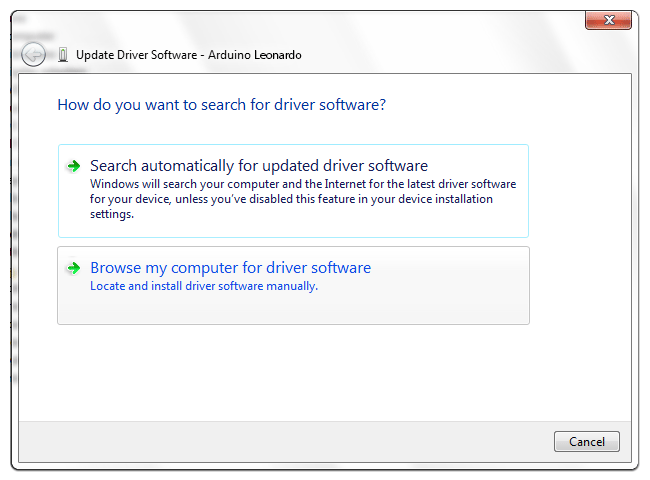{kind=link}
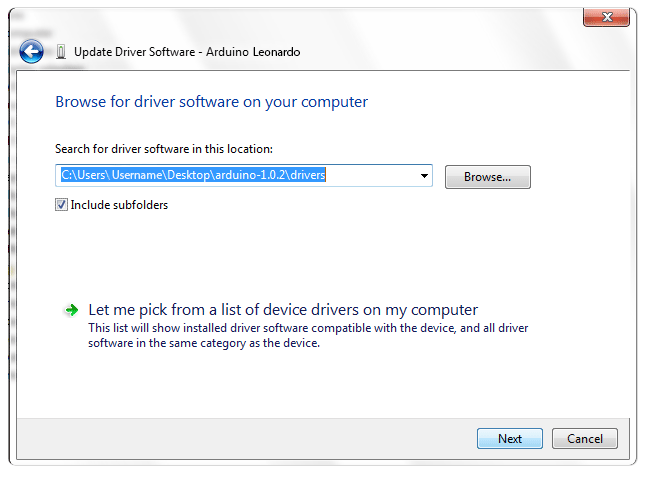{kind=link}
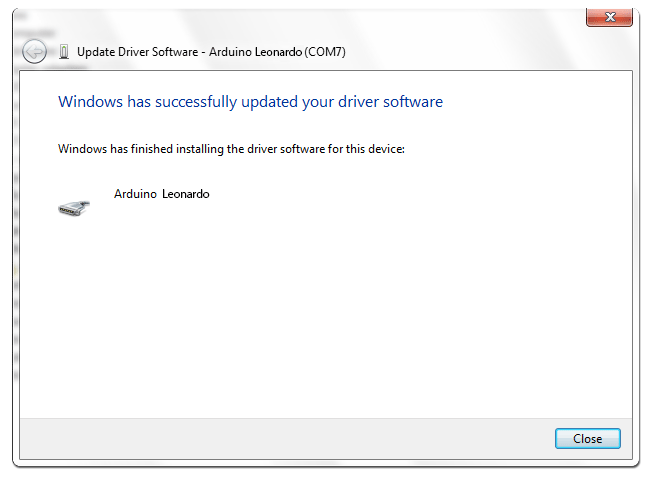{kind=link}
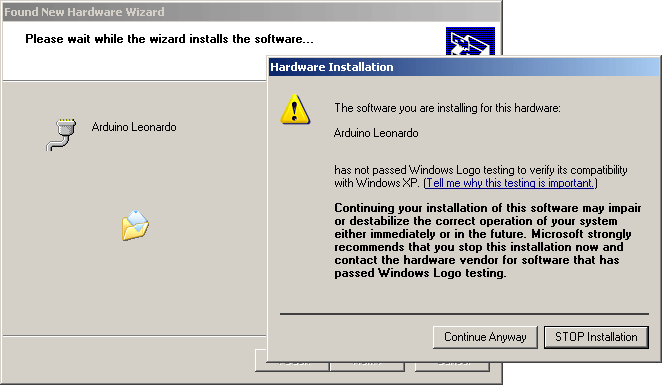{kind=link}
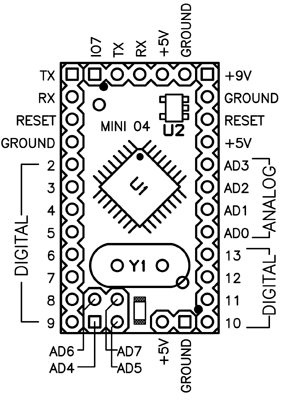{kind=link}
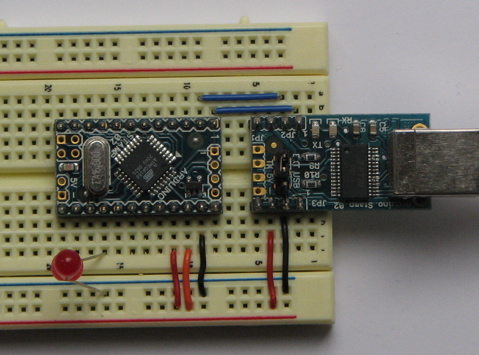{kind=link}
{kind=link}
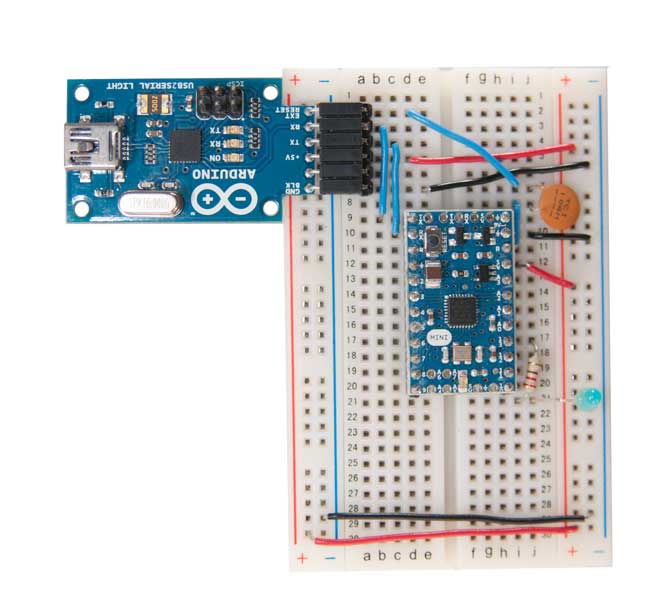{kind=link}
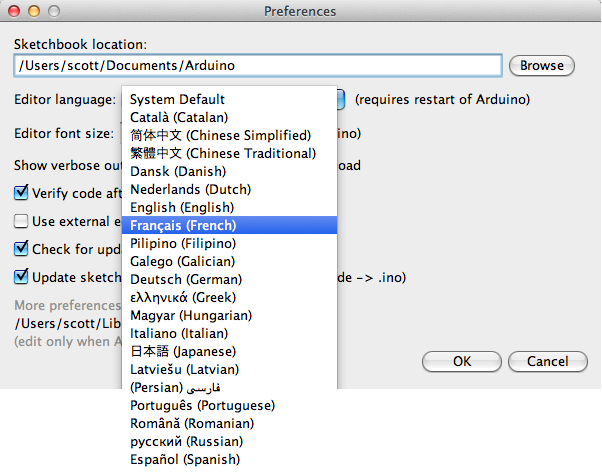{kind=link}
{kind=link}
{kind=link}
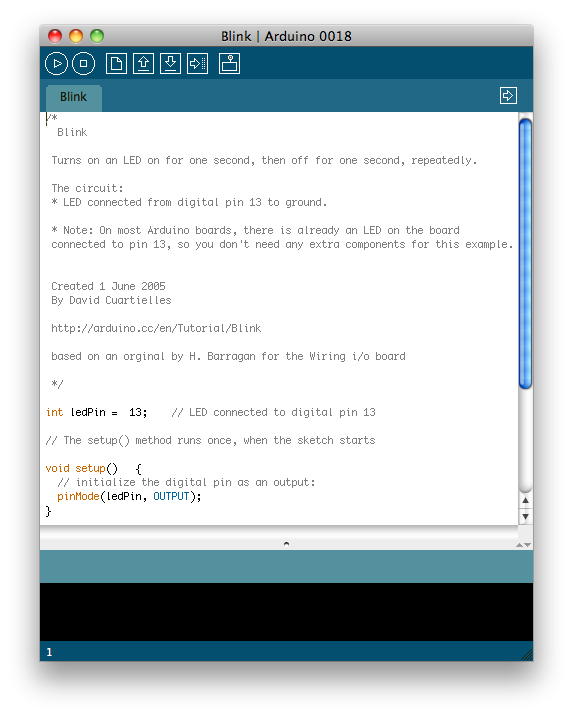{kind=link}
{kind=link}